چسباندن در تقریباً هر صنعتی از جمله خودرو، ساختمانهای تجاری تا ماشینآلات دیگر ضروری است. چسباندن فرآیند ذوب دو قطعه فلز و معرفی مواد پُرکننده است. معمولاً یک فرد از ابزار دستی به نام مشعل چسباندن برای ذوب فلز و همزمان اضافه کردن مواد پُرکننده استفاده میکند. این روش گاهی آهسته است و بسیار دقیق نیست و ممکن است مشکلاتی مانند جفتهای ضعیف یا خطاهایی در چسباندن ایجاد کند. این دلیل است که ما رباتها را داریم که این فرآیند را انجام میدهند و عملیات چسباندن را انجام میدهند.
یک سیستم رباتیک چسباندن MINYUE برای انجام چسباندن بدون شов استفاده میشود، همانند یک ماشین خودرو روی زمین کارخانه، بدون حضور عملکرددهنده. آنها در کارخانهها، در محلهای ساخت و ساز و در انواع صنایع برای حرکت سریعتر و دقیقتر کار استفاده میشوند. یکی از بزرگترین مزایای درد زدن نقطهای روباتیک سرعت چسباندن آنها در مقایسه با انسانها است. محصولات میتوانند به سرعت بیشتری تولید شوند که امری حیاتی برای برآورده کردن نیازها و تحویل به موقع وظایف است.
پس اگرچه این رباتها هنوز قدرتمند به اندازه برخی رباتهای در حال حاضر موجود نیستند، اما رباتهای قدرتمندتر بسیار دقیق هستند. آنها میتوانند برنامهریزی شوند تا جوشکاریهای کامل و بدون خطا انجام دهند، که این به معنای کیفیت بالاتر محصول است. داشتن جوشهای یکسان و قوی کمک میکند تا محصولات نهایی امن و مؤثر باشند. این موضوع همچنین باعث میشود که کمتر از مواد اولیه ضایع نشود، که علاوه بر دوستی با محیط زیست، هزینههای شرکت را نیز کاهش میدهد.
این دقت که توسط رباتهای جوشکاری MINYUE فراهم میشود، منجر به کیفیت بهتر جوشکاری میشود. این رباتها میتوانند برنامهریزی شوند تا همان جوش را به طور دقیق و همواره یکسان انجام دهند، بنابراین هر محصول تولیدی به یک استاندارد مشخص رسیده و سازگار باشد. انسانها، به طور مخالف، ممکن است ناسازگار عمل کنند که این منجر به تغییرات در کیفیت محصول میشود. این موضوع منجر به ناسازگاری بین بخشها میشود که میتواند نیاز به بازسازی یا پرت掷 کردن قطعاتی که به استاندارد نرسیدهاند را ایجاد کند.
رُباتهای دریافت نیز به اندازه کافی هوشمند هستند تا خطاها را در طول فرآیند دریافت تشخیص دهند. اینگونه رُباتهای MINYUE با حسگرهایی مجهز شدهاند که عملیات دریافت را به صورت زنده ردیابی میکنند. مثل اینکه اگر سرعت بیش از حد سریع باشد یا جریان گاز مناسب نباشد، رُباتها میتوانند به صورت فوری آن مشکلات را تنظیم و اصلاح کنند. این گرمکار دستروبروی رباتیک قدرت برای اصلاح سریع خطاها نشان میدهد که چالشها میتوانند قبل از تبدیل شدن به مشکلات بحرانی که باعث تاخیر یا هزینههای اضافی میشوند، حل شوند.

استفاده از رُباتهای دریافت نیز به طور قابل توجهی ایمنی در محیط کار را افزایش میدهد. دریافت یک شغل خطرناک برای انسانها است، زیرا کارگران در طول کار تحت تأثیر دود خفکین، شعلههای نورانی و دماهای بسیار بالا قرار میگیرند. استفاده از رُباتها برای انجام عملیات دریافت بسیاری از این خطرات را حذف میکند و اطمینان میدهد که کارگران از بیماریها و خطرات محافظت شوند. رُباتها میتوانند برنامهریزی شوند تا در شرایط خطرناکی که برای انسانها امن نیستند، فعالیت کنند.

یک ربات کاربردی برای جوشکاری میتواند شمار زیادی از وظایف در صنایع مختلف را انجام دهد. به عنوان مثال، در صنعت خودرو، آنها برای جوشکاری بدنههای ماشینها به کار گرفته میشوند تا اطمینان حاصل شود هر قطعه به درستی جمع شده است. رباتهای جوشکاری در صنعت ساختمان نیز برای جوشکاری اجزای سازهای بناها استفاده میشوند تا اطمینان حاصل شود بناها قوی و امن هستند. در حالی که بعضی از آنها رباتهای درمانی برای فروش آموختهاند که جوشهای نقطهای برای قطعات هواپیما در صنعت فضایی انجام دهند، که این موضوع برای نگهداری از ایمنی هواپیماها در هنگام پرواز بسیار حیاتی است.
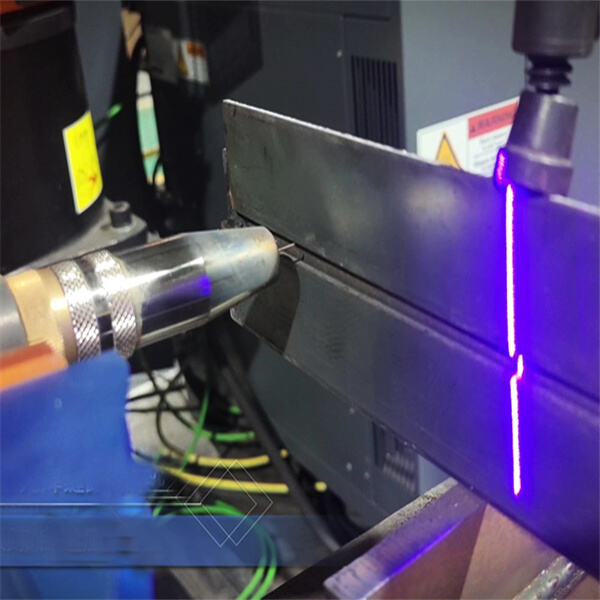
استفاده از عملکرد یافتن و ردیابی، اسکن شwen ناخص، تأیید موقعیت و اطلاعات ناخص، اصلاح موقعیت ناخص بین نقشه طراحی سه بعدی دیجیتال و قطعه واقعی، و حل مشکل ناخص عرضی ناشی از خطا در مواد ورودی و تغییر شکل گرمایی.
سریع، دقیق، کاملاً بدون برنامهنویسی، با کارایی و دقت بالا. این موضوع فرآیند آموزش پیچیده رباتهای سنتی را حل میکند و زمان دوبارهسازی فرآیند آموزش را صرفهجویی میکند.
شرکت فناوری بجینگ مینیو، به عنوان بزرگترین شرکت فناوری پیشرفته جهان در حوزه کاربردهای هوشمند غیرآموزشی رباتهای صنعتی، تخصص خود را در تولید سیستمهای تولید هوشمند انعطافپذیر قرار میدهد. ما با سیستم تصمیمگیری هوشمند RobotSmart، سیستم بینایی هوشمند SmartVision - نور ساختاری دوچشمی، و سیستم ردیابی خط لیزری SmartEye - بینایی لیزری، راهحلهای جدیدی برای درمان و برش رباتهای هوشمند ارائه میدهیم.
فراهم کردن ربات درمان قدرتمند با بارگذاری از جلو، بارگذاری از طرفین، بارگذاری معکوس، نصب گنتری، برنامهریزی مسیر هوشمند برای چندین ربات، چند محور خارجی و پوزیشنر برای همکاری در کار. به منظور شبیهسازی حرکت ربات، تشخیص تصادف، اجتناب از تکینگی و تشخیص محدودیت محور.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK









