 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



SLHA-120 Sensor de seguimiento de juntas láser
Con función de búsqueda de posición, seguimiento en tiempo real, escaneo y soldadura automática.
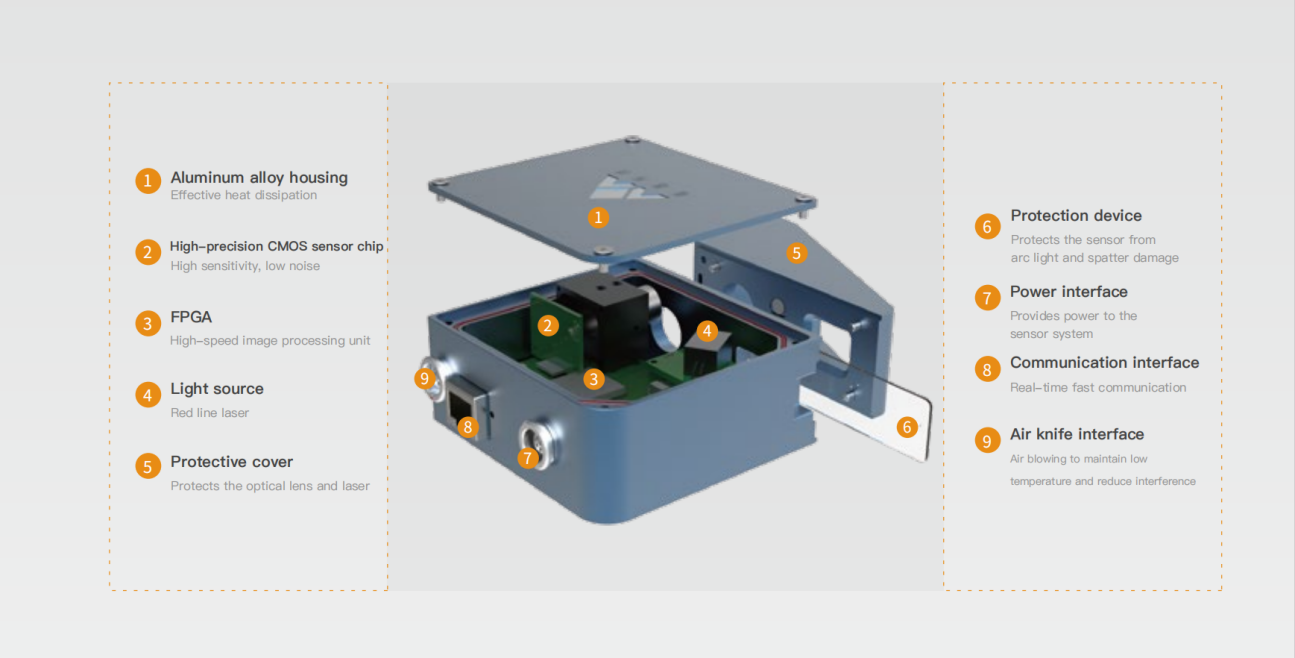
- Resumen
- Soporte para marca de robot
El sensor de seguimiento de juntas por láser utiliza un láser para irradiar la superficie de la junta de soldadura, formando una banda de luz láser, la cual es recibida e imagenada por una cámara de alta definición. A través del procesamiento algorítmico, las características tridimensionales de la junta de soldadura se transforman en información estructurada, incluyendo coordenadas de la junta, desalineaciones, huecos, etc. Esta información se transmite al controlador del robot, proporcionándole la trayectoria y los parámetros de proceso necesarios para la soldadura, guiando al robot para soldar o corregir desviaciones de piezas en tiempo real, logrando un trabajo de soldadura perfecto. En comparación con otras soluciones, el seguimiento de juntas por láser tiene las ventajas de ser no destructivo, alta precisión, velocidad rápida y buena adaptabilidad.

El sensor adopta la medición de luz estructurada lineal, que tiene una velocidad rápida de imagen en línea, sin contacto y sin movimiento mecánico; Fuerte adaptabilidad, capaz de generar parámetros de la costura de soldadura; Totalmente embebido, con computadoras industriales externas y muchas otras ventajas, se utiliza ampliamente en diferentes tipos de soldadura automatizada. Independientemente del proceso de soldadura, podemos proporcionar un soporte confiable y un rendimiento estable para garantizar excelentes resultados en diferentes escenarios de soldadura.
Interfaz de software gráfica completa, proceso de configuración de parámetros, detalles del menú de ayuda, los no profesionales también pueden comenzar rápidamente
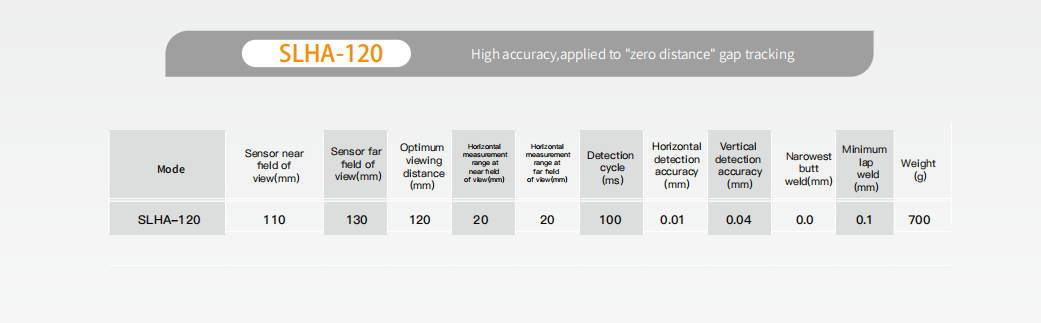
*La detección de cero hueco se refiere a sensores equipados con esta función, que pueden utilizarse para identificar huecos inferiores a 0,1 mm
*La distancia de visión es solo para referencia y puede ajustarse según las necesidades específicas del usuario
El sensor es adecuado para las aplicaciones más exigentes, ya que es insensible a la luz dispersa, agua y polvo (IP67) e inmune a la radiación electromagnética (EMC).
Con Función Poderosa.
01. corrección de posición y desviación
La función de corrección de posición y desviación se utiliza en escenarios de soldadura flexible de piezas diferentes con el mismo modelo pero con tolerancias inconsistentes. Esta función asegura que no se requiere intervención manual al cambiar las piezas, y el robot es guiado por el sistema de corrección de posición y desviación para lograr una soldadura precisa.
Posicionamiento de dos puntos adecuado para costuras rectas con compensación 2D.
Posicionamiento Multi-Punto Adecuado para soldaduras 2D con múltiples segmentos y desplazamiento.
Posicionamiento de Segmentos Adecuado para soldaduras 3D con múltiples segmentos y desplazamiento.
02 Seguimiento en Tiempo Real
La función de seguimiento en tiempo real se utiliza en escenarios de soldadura que requieren alta eficiencia y sin interferencias espaciales. El sensor está fijo en relación con la antorcha de soldadura, y la antorcha ajusta automáticamente la trayectoria de soldadura según los datos de coordenadas 3D.
03. Escaneo y Soldadura Automática
La función de escaneo y soldadura automática permite que el sensor recoja primero la información geométrica de las soldaduras. Esta función es adecuada para espacios de soldadura reflectantes, estrechos y escenarios de soldadura complejos.
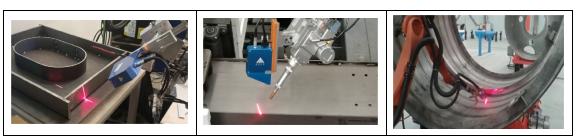
Seguimiento de Juntas Láser
El Seguimiento de Juntas Láser puede detectar desviaciones de soldadura altas, bajas, izquierda y derecha.
Puede detectar soldaduras de unión con pequeños espacios.
Resuelve el problema de seguimiento de juntas de soldadura para placas delgadas.
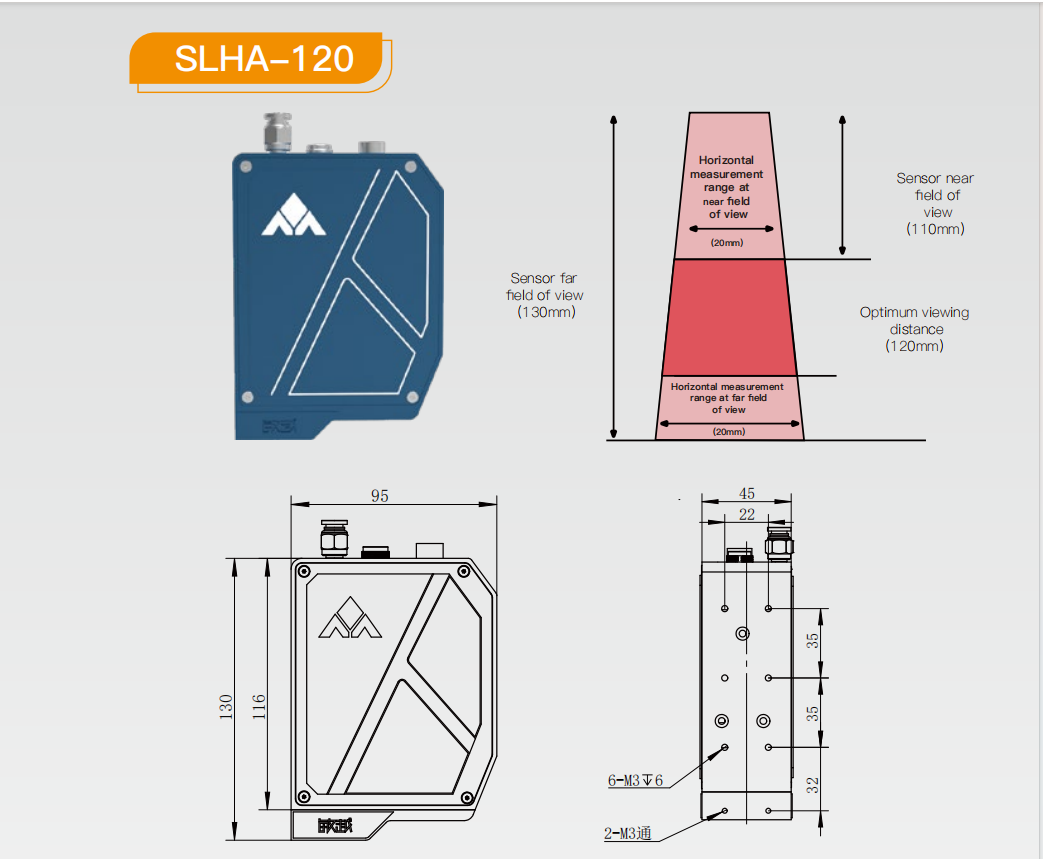
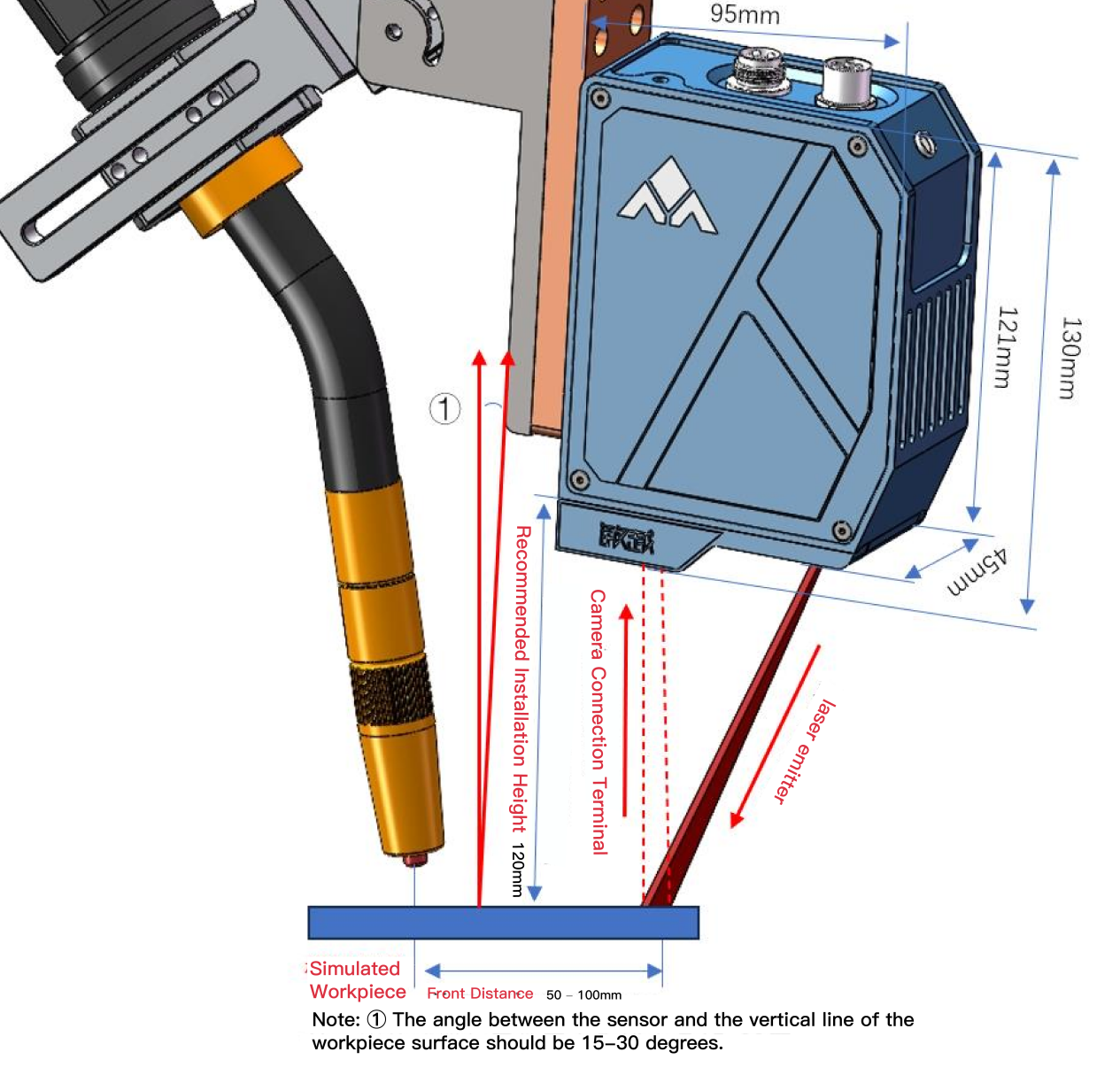
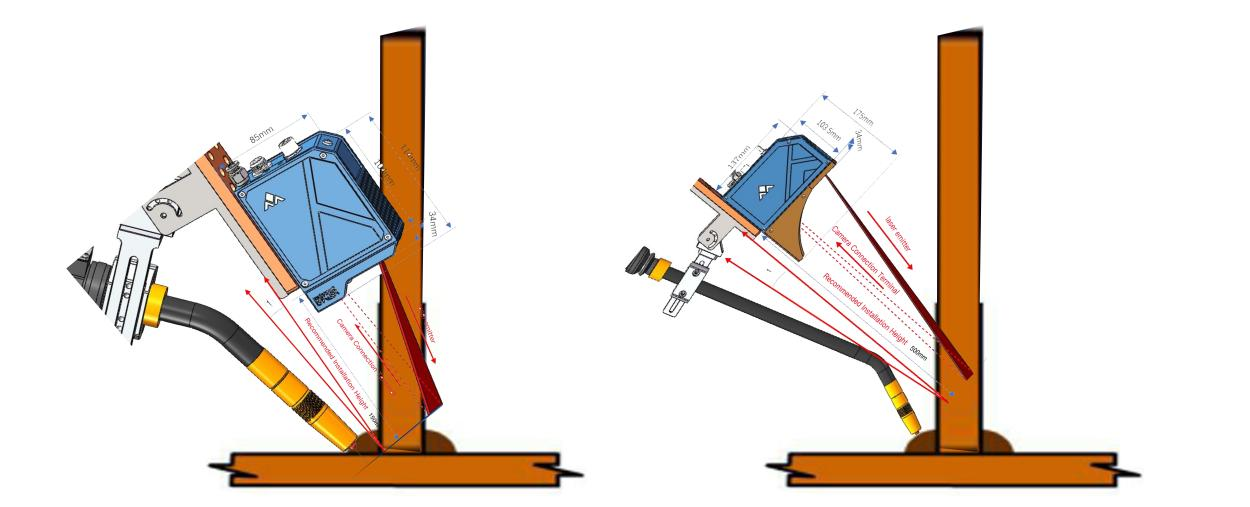
La distancia óptima de observación es de aproximadamente 120 mm.
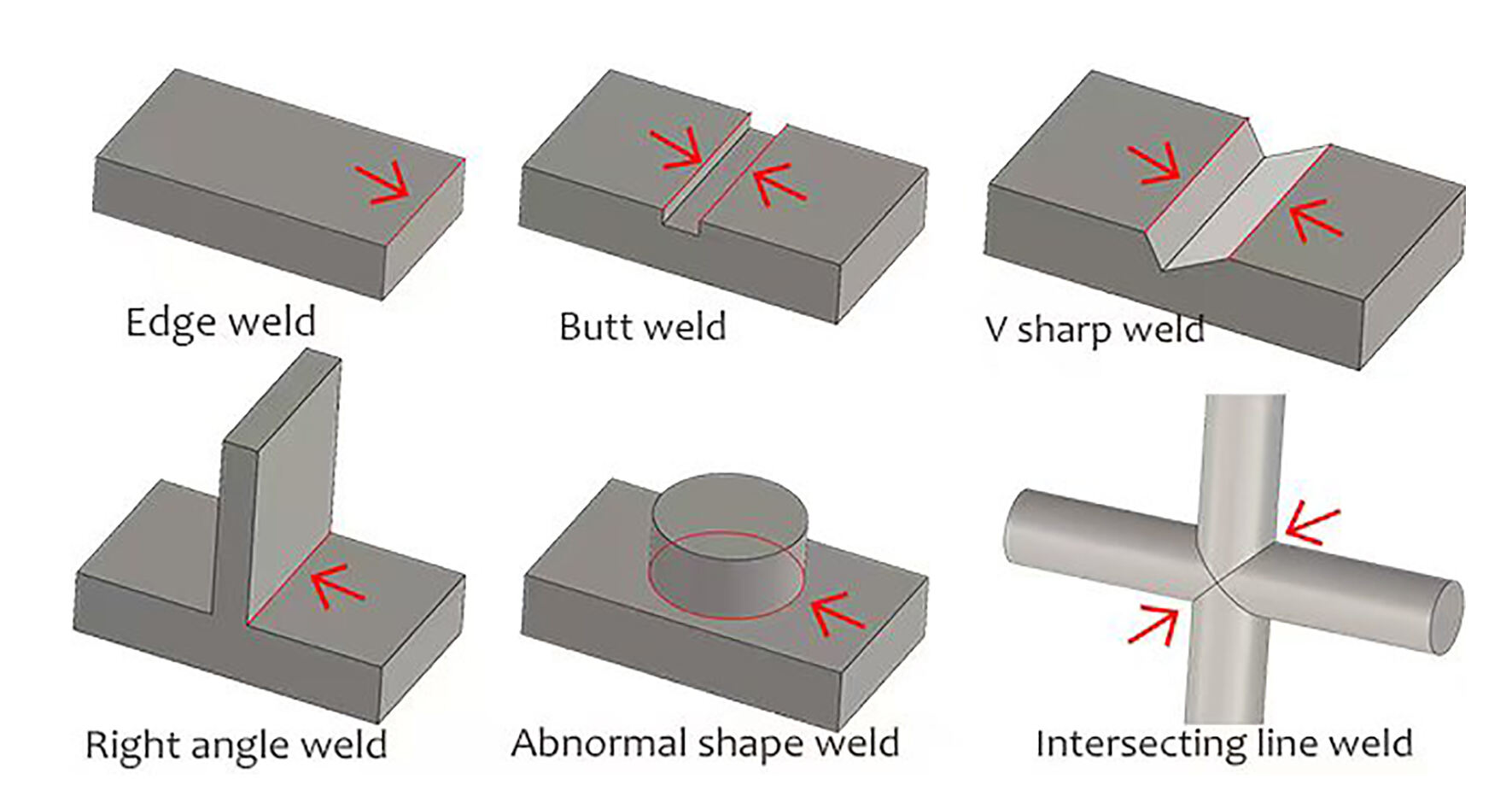
Tipo de soldadura soportado
Soldadura en V
Soldadura en chanfle
Soldadura de dobladillo
Soldadura de unión
Soldaduras superpuestas, etc.
Alta precisión, soldaduras sin juego. Adecuado para la industria de soldadura de acero inoxidable.
Con luz láser azul para una alta reflexión de luz y un entorno brillante. Especialmente diseñado para el proceso de soldadura láser de aleaciones de aluminio.
Por favor, seleccione el tipo razonablemente según el alcance real de la aplicación, para evitar colisiones entre el sensor y la pieza, normalmente la carga del robot necesita 20KG.
Socio Cooperativo

Soporte para marca de robot







