 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Təlimsiz Çəlb Struktur Portal Intellect Robotu

Çəlb Qabli Dəmir Əsaslı Strukturdu Gəntrik Qovşağı Robotu
Bu texnikalar, dəmir əsaslı struktur üçün mütəxəssisliklərlə avtomatlaşdırılmış istehsal üçün dəmir əsaslı struktur fabrikalarda hazırlanmış xüsusi vəziyyətdədir.
Bu texnikalar, dəmir əsaslı struktur üçün mütəxəssisliklərlə avtomatlaşdırılmış istehsal üçün dəmir əsaslı struktur fabrikalarda hazırlanmış xüsusi vəziyyətdədir.
1. Texnika əsasən şunlardan ibarətdir: reyl hissələri, gəntrik hissələri, robot düzəldilməsi hissələri, elektrik idarəetmə qutusu hissələri, vətər təchizatı hissələri və s.
2. Gəntrik komponentləri əsasən sürüş nöqtəsi çərçivəsi, kənar çubuğu, düzəldilən çərçivə və s. ilə ibarətdir. Sürüş nöqtəsi çubuğu, kənar çubuk və düzəldilən çərçivə hamısı qutu çubuğu vətər strukturu ilə istifadə edilir və daha sonra vətərden sonra stressi azaltma prosesi keçirilir. Struktura sıxışdırılmışdır və görünüşü gözəl olur.
3. Butun makinanın aktiv sürüş nihyəsi, Japon Panasonic AC servodrayveri və motoru istifadə edir, Japon SHIMPO redüksorunu sürüşlərə salır və sonra dişli və dişli şerit vasitəsiylə hərəkət edir. Sürüş nihyəsinin yan tərəfində üzlük rəhbəri quraşdırılır. Üzlük rəhbəri, eksentrik şaftını düzəldərək rəhbər rayına basa bilər, bu da butun makinanın işləməsində stabilliyini və dəqiqliyini təmin edir.
4. Sehpa üçün hərəkət edən rəhbər rayları hamısı 38KG/M-dən ibarətdir. Rəhbərlərin xarici tərəfləri, dişli şeritlə donanıbladır. Dişli şerit, 45 çeliyi və modulu 2.0 olan materialdan hazırlanmışdır. İki tərəfli sürüş üsulu istifadə edilir. Rəhbərlər, basma pleyta arka pleytləri vasitəsiylə sabitləşdirilir. Bu quraşdırılma üsulu, iki rəhbərin uzunluqda düzgünlüyü və paralelliyi kimi əhəmiyyətli texnik parametrləri təmin edir.
Təlimati olmayan inkişaflı qovuşma üçün dəstək xüsusilə çərçivəli 3D çəkisi importu, qovuşma jürəyinin avtomatik çıxarılması, robot qovuşma yolu avtomatik yaradılması, vəziyyət vizualizasiyası, qovuşma aletinin təcrübəsizliklərinin avtomatik aşkarlanmasıdır.
Robot qovuşma yolu avtomatik yaradılması, vəziyyət vizualizasiyası, qovuşma yolu optimallaşması, aletin təcrübəsizliklərinin avtomatik aşkarlanması.
Və çərçivə növü olmaksızın, 3D skaninq reversiv modelinq, sürətlə 3D çərçivələrin yaradılması, robot qovşum traektoriyasının avtomatik yaradılması, qovşum traektoriyasının optimallaşması, pozisiyanın vizuallaşdırılması, qovşum torbasının toslamasını avtomatik şəkildə aşkarlamaq.
Parametr
| Əməliyyat hissəsinin maksimum uzunluğu | 11m |
| Flanş Enliyi | 2.5m |
| Portalın köçürülən ray ölçüsü | 2800 mm |
| Portalın köçürülən mOTOR gücü | 2x0.75 kW |
| Portalın köçürülən qovuşma sürəti | 100-1000 mm/min |
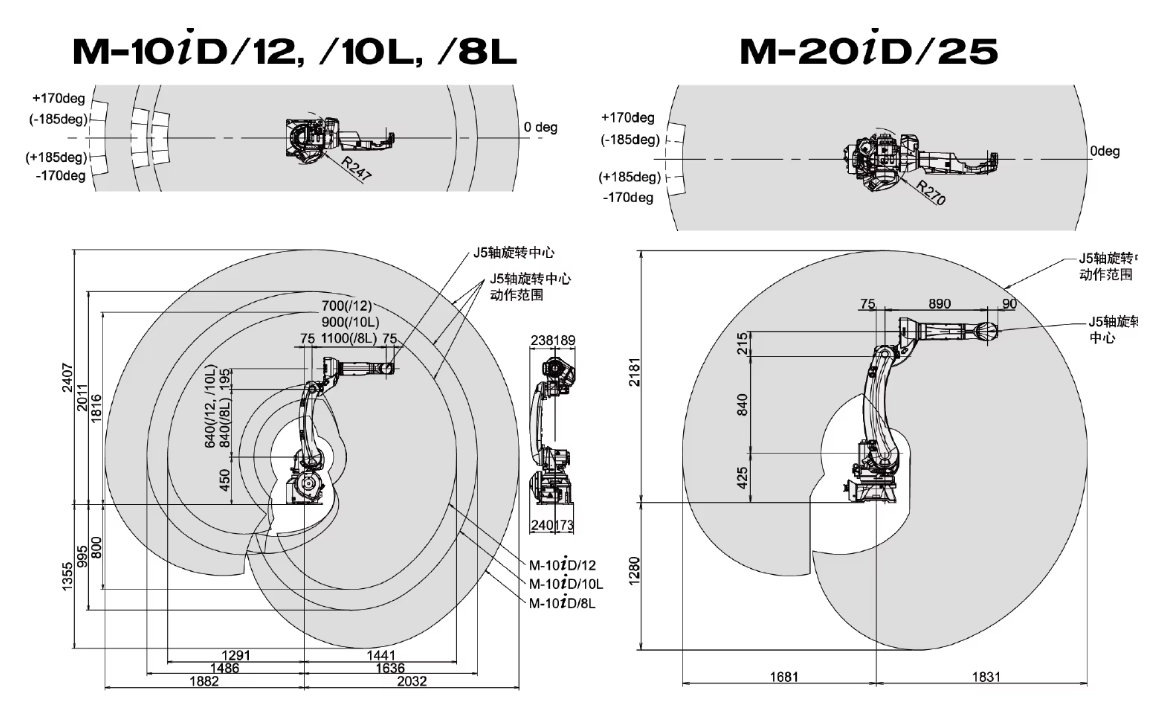
Qaynaq robotu
İaponiya da FANUC qovuşma robodu istifadə edir. Məxsus robot parametrləri aşağıdakı kimi dir.
LDWEP-500 lazer tracker
LDWEP-500 inteligent sətir skanlayıcı qovuşma jövharı sensörüdür. Bu, sətir lazer skanlayıcı vasitəsi ilə qovuşma jövharı hissəsinin kontur məlumatlarını əldə edir və robotu və ya qovuşma maşınıni avtomatik olaraq tamamlamasına kömək edir. Sensörün daxilində görsəl alınma, işləmə və qovuşma jövharı tanımlama funksiyaları yerinə yetirilir və xarici kompüterə ehtiyac yoxdur. Bu, yüksək inteqrasiya səviyyəsinə malikdir və sistemnin ümumi aparatur maliyyəsini azaldır. Qovuşma şənginə və patlamalara qarşı dayanıqlıdır, intellectüal olaraq qovuşma jövhalarını tanıyır və istifadə asandır. Bu, mükəmməl struktur, sıx ölçülər, yüksək erişimlik və böyük növlər ilə tanınır. Tətbiq sahəsə görə seçilmiş və ən uyğun parametrlər təyin edilə bilər.

Qovuşma Kuvvet Mənbəsi Çəkilmiş Fəllak Strukturu Sanayi H Beam 6-9 Axis Qovuşma Robot Stansiyası Çin
Megmeet CM500 düzmək gücü mənbəsindən istifadə: tamamilə rəqəmsal sənayiyyə üçün ağır yüklu CO2/MAG/MMA inтеллектüal düzmə maşını. Bu, müxtəlif karbon çərbi düzüm işləmə sahələrində geniş şəkildə istifadə olunur: raylı nəqliyyat, avtomobil, gemi inkişafı, çərbi struktur, konteyner, mühəndislik, hara və digər sənətler, həmçinin sənayiyyədə ağır yüklü və ciddi şəraitlərdə əməliyyatlarda da.







