 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


روبوت لحام ذكي بدون تعليم للهياكل الفولاذية من نوع الجantry

روبوت لحام جسر هيكلي من الفولاذ
هذه المعدات هي روبوت لحام خاص بالهياكل الفولاذية مصمم حسب الطلب لإنتاج تلقائي في مصانع الهياكل الفولاذية.
هذه المعدات هي روبوت لحام خاص بالهياكل الفولاذية مصمم حسب الطلب لإنتاج تلقائي في مصانع الهياكل الفولاذية.
1. تتكون المعدة بشكل أساسي من: أجزاء السكة، أجزاء الجسر، أجزاء تعديل الروبوت، أجزاء صندوق التحكم الكهربائي، أجزاء مصدر الطاقة لللحام، وغيرها.
2. تتكون مكونات الجسر بشكل أساسي من إطار محرك، عارضة横 Beam، وإطار تعديل، وما إلى ذلك. يعتمد الإطار المحرك، العارضة والهيكل القابل للتعديل جميعًا على بنية لحام شعاع الصندوق، ثم تخضع لمعالجة إزالة الإجهادات بعد اللحام. الهيكل مدمج والمظهر جميل.
3. يستخدم الجزء النشط من العارضة المحركة للآلة بالكامل محركًا خدميًا AC من شركة Panasonic اليابانية ومحركًا لتشغيل مخفض SHIMPO الياباني، ومن ثم يتم نقل الحركة بواسطة عجلة ترسية وسنّة. تم تركيب عجلة إرشادية أفقية على جانب العارضة المحركة. يمكن ضغط العجلة الإرشادية ضد السكة عن طريق ضبط محورها الاختياري، مما يضمن استقرار تشغيل الآلة بأكملها ودقتها.
4. تتكون سكك التوجيه المتحركة للعربة بالكامل من مادة 38KG/M. تم تجهيز الجوانب الخارجية للسكك بتسنيمات مصنوعة بدقة. التسنيم مصنوع من الصلب 45 بموديول 2.0. يتم اعتماد طريقة الدفع الثنائية. يتم تثبيت السكك عبر ألواح الضغط الخلفية. يمكن لهذه الطريقة التثبيتية أن تضمن المعايير الفنية المهمة مثل الخطوط المستقيمة الطولية والموازاة بين السكتين.
الدعم لغير التدريس الذكي للحام يتم تقسيمه بشكل خاص إلى استيراد الرسومات ثلاثية الأبعاد من نوع الرسم، استخراج تلقائي لخط الحام، توليد تلقائي لمسار حام الروبوت، تمثيل بصري للوضع، وكشف تلقائي عن اصطدام ملقط الحام.
توليد تلقائي لمسار حام الروبوت، تمثيل بصري للوضع، تحسين مسار الحام، وكشف تلقائي عن اصطدام الملقط.
وبعد ذلك بدون نوع الرسم، نمذجة عكسية بالمسح الضوئي ثلاثي الأبعاد، توليد سريع للرسومات ثلاثية الأبعاد، توليد تلقائي لمسار لحام الروبوت، تحسين مسار اللحام، تمثيل الحالة بصريًا، الكشف التلقائي عن اصطدام فوهة اللحام.
المعلمة
| أقصى طول للقطعة العاملة | 11م |
| عرض الفlangة | 2.5م |
| مسافة سكة تحرك الهيكل المرتفع | 2800 ملم |
| قوة محرك تحرك الهيكل المرتفع | 2x0.75 kW |
| سرعة حركة الحام للهيكل المرتفع | 100-1000 مم/دقيقة |
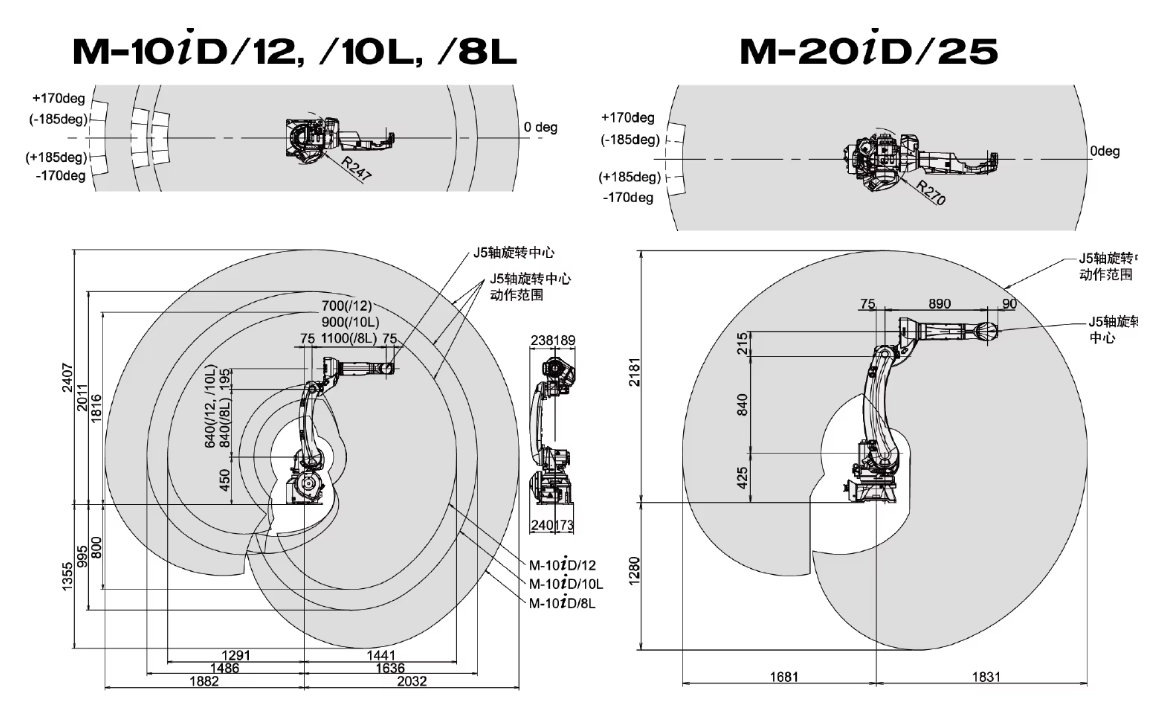
روبوت لحام
يتم استخدام روبوت الحام FANUC الياباني. مواصفات الروبوت المحددة كما يلي.
LDWEP-500 laser tracker
LDWEP-500 هو مستشعر ذكي للمسح الضوئي لخط اللحام. يحصل على معلومات التفاصيل المقطعية لخط اللحام من خلال المسح الضوئي بالليزر الخطي، ويدفع الروبوت أو آلة اللحام لإكمال عملية اللحام تلقائيًا. يتم إجراء عمليات التقاط الصور ومعالجتها وتحديد خط اللحام داخل المستشعر دون الحاجة إلى جهاز كمبيوتر خارجي. يتميز بتكامل عالٍ ويقلل من تكلفة الأجهزة العامة للنظام. مقاوم لضوء القوس الكهربائي والتناثر، يمكنه تحديد خطوط اللحام بشكل ذكي، وسهل الاستخدام. له بنية رائعة، حجم صغير، سهولة الوصول، وأنواع متعددة. يمكن اختياره واستخدامه بناءً على السيناريو التطبيقي، ويمكن تخصيص أفضل المعلمات المناسبة.

مصدر طاقة اللحام الهيكلي الصلب الصناعي H Beam 6-9 محور محطة روبوت اللحام الصين
استخدام مصدر طاقة اللحام Megmeet CM500: آلة لحام ذكية صناعية ثقيلة رقمية بالكامل لمختلف أنواع اللحام CO2/MAG/MMA. يتم استخدامها على نطاق واسع في مجالات معالجة اللحام للصلب الكربوني: النقل عبر السكك الحديدية، السيارات، بناء السفن، الهياكل المعدنية، الحاويات، الآلات، المعدن وغيرها من الصناعات، بالإضافة إلى العمليات الصناعية الثقيلة والبيئات القاسية.







