EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


حل كاميرا ثنائية العدسة + نظام رؤية ليزر، تصوير ثابت باستخدام كاميرا ثنائية العدسة، سكة مزدوجة على الأرض، قطع بلازما
نطاق العمل:
الخندق الموجب: 100x100-7000x1200mm@20-45°
الانحدار العكسي: 100x100-6800x1000mm@40-60°
قص الانحدار الذكي بدون تعليمات
قص ولحام الانحدار في العملية السابقة، يمكن أن تؤدي مشاكل الجودة والكفاءة مباشرة إلى رقاب الإنتاج، وهذا صحيح بشكل خاص في قص الانحدار للقطع الصغيرة. يتم الآن استخدام قص اللهب التقليدي بشكل شائع لقص الانحدار للقطع الصغيرة، والذي يتطلب عملية الرسم المسبق، وضع القطعة، وقص الانحدار باستخدام عربة اللهب، كما يتطلب مساحة عمل صغيرة، وكل مرة يتم فيها تغيير القطعة، يجب إعادة تسخينها مجددًا بشكل فردي. لذلك، فإن عملية قص اللهب التقليدية تعاني من نقص في اتساق نطاق الانحدار، جودة سيئة، كفاءة منخفضة، استهلاك更多的 العمالة، ومدى تطبيق ضيق وغيره من العيوب.
تكنولوجيا MINYUE غير التعليمية تستخدم نظام اتخاذ قرارات ذكي RobotSmart مع نظام رؤية ثلاثية الأبعاد SmartVisions ونظام تتبع ليزر SmartEye لتحقيق "قطع ذكي بدون برنامج + رؤية". يحل آلام الإنتاج الناتجة عن صعوبة البرمجة وانخفاض مستوى الذكاء، وفي نفس الوقت يلبي متطلبات قطع دفعات صغيرة من أنواع مختلفة من القطع، مما يحسن كفاءة المعالجة ومعدل الإنتاج.

في مواجهة مهام أكثر تعقيدًا وتنوعًا، هناك فقط ثلاثة خطوات.
1. استيراد ملفات CAD DXF؛ 2. التخطيط السريع للمسار؛ 3. إنشاء برامج القطع تلقائيًا، ثم يمكن إكمال مهمة القطع بسرعة.
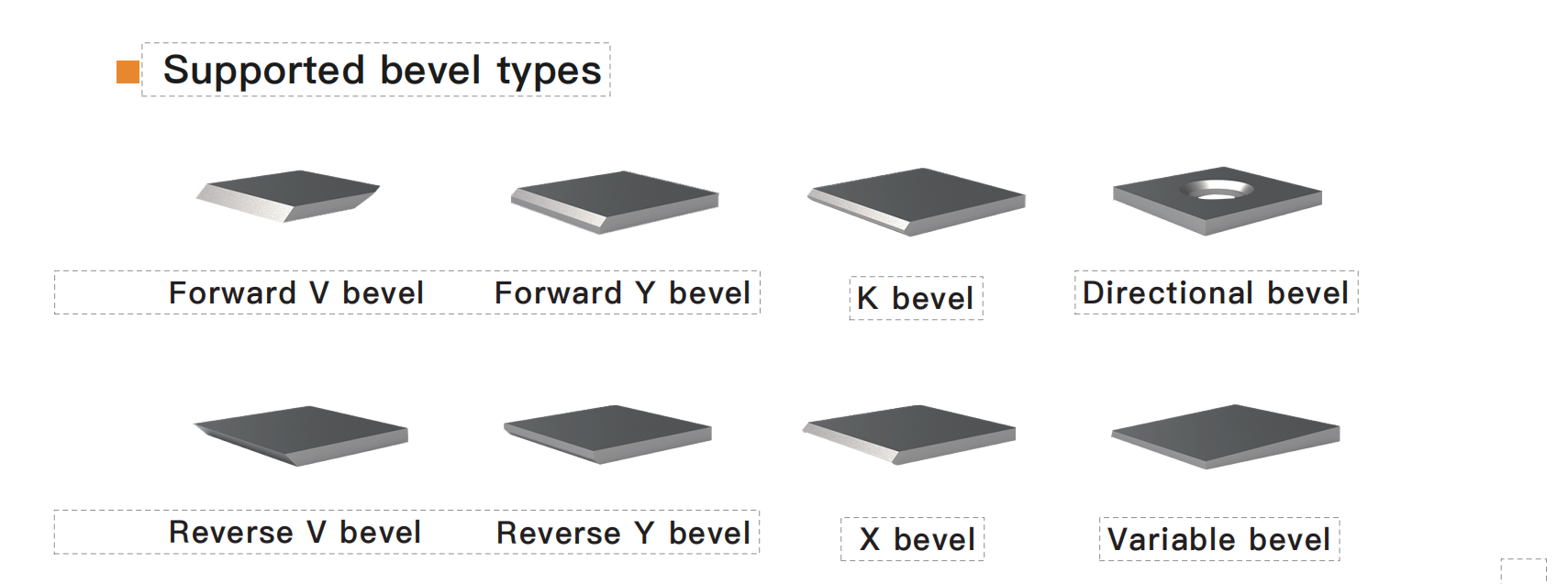
تحسين مسار القطع تلقائيًا، والتخطيط الذكي لمسارات القص، وعدم قطع العكس للأسطح المائلة العلوية والسفلية.
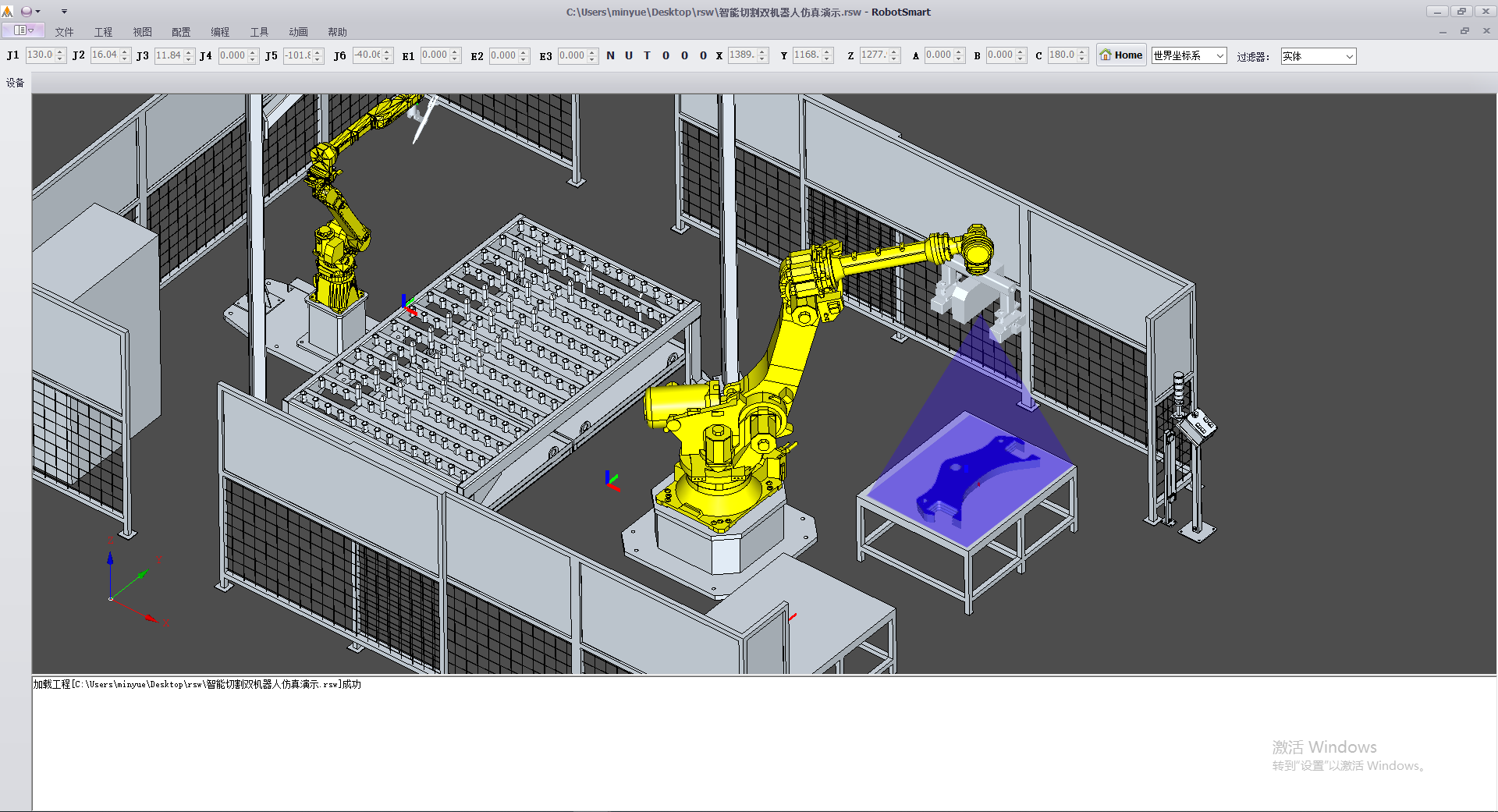
تلتقط كاميرا الم-binoculars صورًا لتحديد موقع قطعة العمل و为抓ها ووضعها على طاولة القطع. بعد اكتمال القطع، تنتقل CNC إلى طاولة القطع للإمساك. يتم التكيف مع عدة قطع عمل في نفس الوقت، وتُخطط مسار القطع تلقائيًا، يتراوح نطاق القطع من 0.5 إلى 4 أمتار. يحسن بشكل كبير كفاءة العمل والأمان. يدعم عملية القطع باللهب وعملية القطع البلازما.
يدعم مجموعة متنوعة من أساليب التحميل والتفريغ، بما في ذلك التحميل والتفريغ اليدوي، التحميل والتفريغ باستخدام رافعة ذراعية، التحميل والتفريغ باستخدام رافعة سياجية، التحميل والتفريغ التعاوني بواسطة روبوتين، التحميل والتفريغ بواسطة CNC.
عملية الإنتاج
● تحديد موقع قطعة العمل على طاولة القطع يدويًا (دقة تكرار موقع قطعة العمل داخل ±5مم).
● الإنتاج الأولي من خلال البرمجيات لتحديد موقع القطع تلقائيًا، يتم إنشاء مسار قياس القطع والمعامِل العملية، يمكن تخزين البرنامج الناتج في نظام التحكم، ويمكن استدعاء الإنتاج اللاحق مباشرة. (يمكن نشر RobotSmart في غضون 15-20 دقيقة من خلال منصة النظام الذكية للقرارات.)
● يستخدم روبوت القطع مستشعر رؤية ليزرية لتحديد موقع القطعة بدقة. (المزايا: كفاءة ودقة أعلى من أجهزة البحث عن الحواف بالاتصال.)
● يدعم محطات عمل الروبوتات ذات السكة الأرضية والمَقْرَن والذراع المعلق.
● تم إطلاق 12 حلًا لسيناريوهات تطبيقية مقسمة.
الأنواع المائلة المدعومة