 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



مستشعر تتبع seems SLHA-120 بالليزر
مع وظيفة العثور على الموضع، تتبع الوقت الحقيقي، المسح التلقائي واللحام.
- ملخص
- يدعم علامة الروبوت
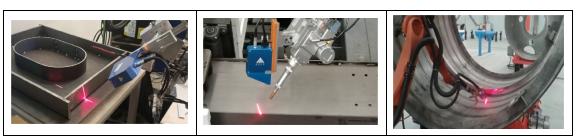
يستخدم مستشعر تتبع seems الليزر ليقوم بإشعاع سطح seem اللحام باستخدام الليزر لتكوين شريط ضوئي ليزري، يتم استقباله وتصويره بواسطة كاميرا بدقة عالية. من خلال معالجة الخوارزميات، يتم تحويل الخصائص ثلاثية الأبعاد لseem اللحام إلى معلومات منظمة، تشمل إحداثيات المفاصل، والانحرافات، والمسافات، وما إلى ذلك. يتم نقل هذه المعلومات إلى وحدة التحكم الروبوتية، مما يوفر للروبوت المسار والمعلمات العملية المطلوبة لللحام، ويوجه الروبوت للقيام باللحام أو تصحيح انحرافات القطع في الوقت الفعلي، مما يؤدي إلى عمل لحام مثالي. مقارنةً بالحلول الأخرى، فإن تتبع seems الليزر يتميز بمزايا عدم الاتصال، والدقة العالية، والسرعة، والتكيف الجيد.

يستخدم المستشعر تقنية قياس الضوء الهيكلي الخطي، والتي تتميز بسرعة تصوير الخطوط العالية، وعدم وجود تلامس، وعدم وجود حركة ميكانيكية؛ قابلة للتكيّف بشكل قوي، قادرة على إخراج معلمات خياطة اللحام؛ مدمجة بالكامل، مع أجهزة تحكم صناعية خارجية والعديد من المزايا الأخرى، وهي مستخدمة على نطاق واسع في أنواع مختلفة من اللحام الآلي. بغض النظر عن عملية اللحام، يمكننا تقديم دعم موثوق وأداء مستقر لضمان تحقيق نتائج ممتازة في سيناريوهات مختلفة للحام.
واجهة برمجية رسومية كاملة، عملية إعداد المعلمات، تفاصيل قائمة المساعدة، يمكن للمبتدئين أيضًا البدء بسرعة
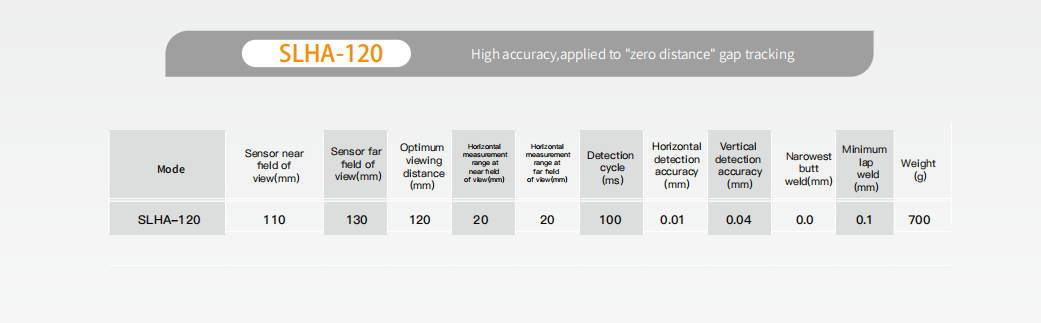
*يشير اكتشاف الفجوة الصفرية إلى المستشعرات المجهزة بهذه الوظيفة، والتي يمكن استخدامها لاكتشاف الفجوات أقل من 0.1 مم
*مسافة الرؤية هي للرجوع إليها فقط وقد تُعدل وفقًا لاحتياجات المستخدم المحدد
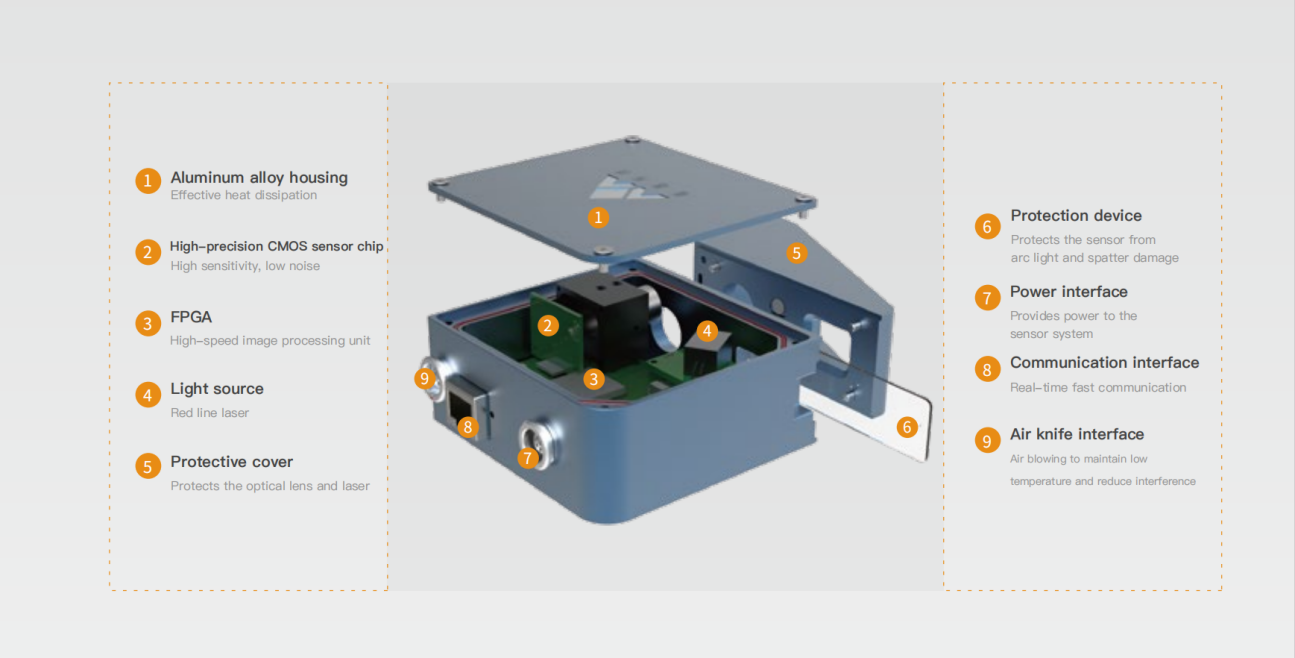
يُعتبر المستشعر مناسبًا لأكثر التطبيقات صعوبة، لأنه غير حساس للضوء المنحرف والماء والغبار (IP67) ولا يتأثر بالإشعاع الكهرومغناطيسي (EMC).
مع وظيفة قوية.
01. تصحيح الموقع والانحراف
تُستخدم وظيفة التصحيح والموقع لسيناريوهات اللحام المرنة للأجزاء المختلفة ذات النموذج نفسه ولكن مع انحرافات غير متسقة. هذه الوظيفة تضمن عدم الحاجة إلى تدخل يدوي عند تبديل الأجزاء، ويتم إرشاد الروبوت بواسطة نظام التصحيح والموقع لتحقيق اللحام الدقيق.
تحديد موقع نقطتين مناسب للحام الـ 2D المستقيم ذو الانزياح.
التوضع متعدد النقاط مناسب للحام ثنائي الأبعاد المزود بتعويض متعدد المقاطع.
توضع المقاطع مناسب للحام ثلاثي الأبعاد المزود بتعويض متعدد المقاطع.
02 تتبع في الوقت الفعلي
تُستخدم وظيفة التتبع في الوقت الفعلي في سيناريوهات اللحام التي تتطلب كفاءة عالية وعدم تداخل فضائي. يتم تثبيت المستشعر نسبيًا بالنسبة لمدفأة اللحام، وتقوم مدفأة اللحام بتعديل مسار اللحام تلقائيًا بناءً على بيانات الإحداثيات ثلاثية الأبعاد.
03. المسح التلقائي واللحام
تتيح وظيفة المسح الضوئي واللحام التلقائي للمستشعر جمع المعلومات الهندسية للحام أولاً. هذه الوظيفة مناسبة للأماكن ذات الانعكاس العالي، والمساحات الضيقة للحام، والسيناريوهات المعقدة للحام.
تتبع خياطة الليزر
يمكن لتتبع خياطة الليزر اكتشاف انحرافات اللحام العالية والمنخفضة واليسرى واليمنى.
يمكنه اكتشاف اللحامات المتصلة ذات الفجوات الصغيرة.
حل مشكلة تتبع خياطة اللحام للوحات الرقيقة المتصلة.
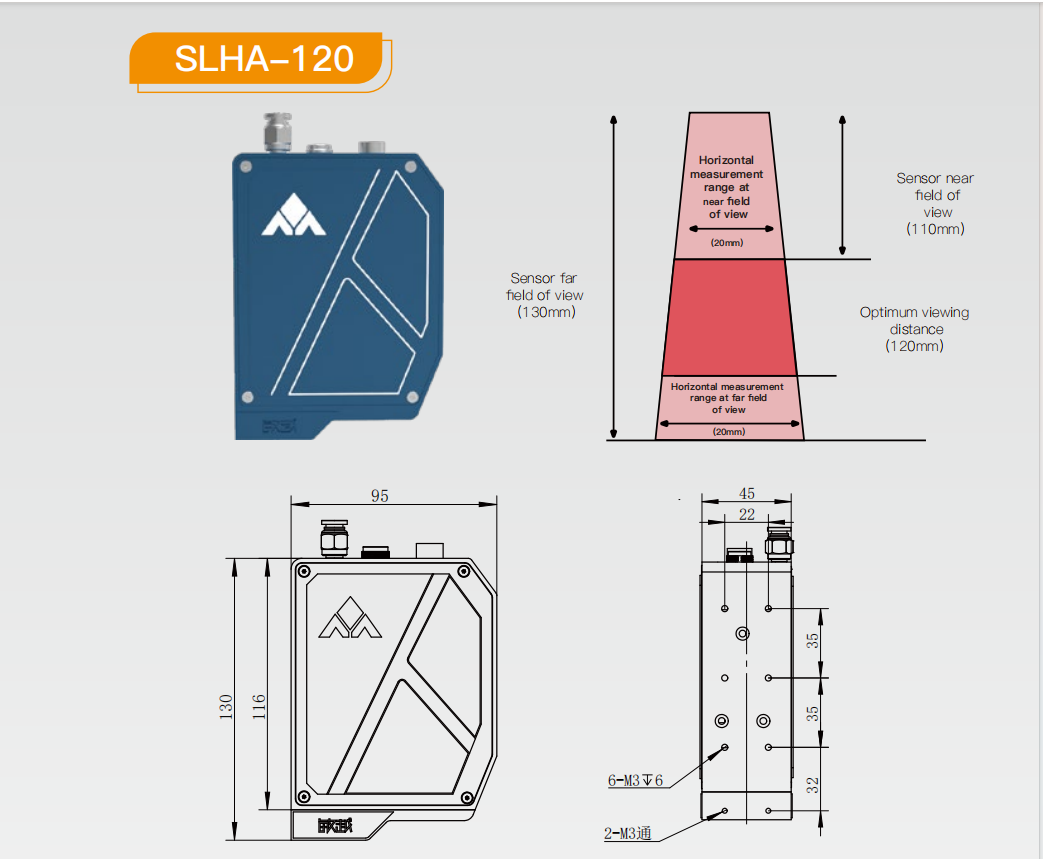
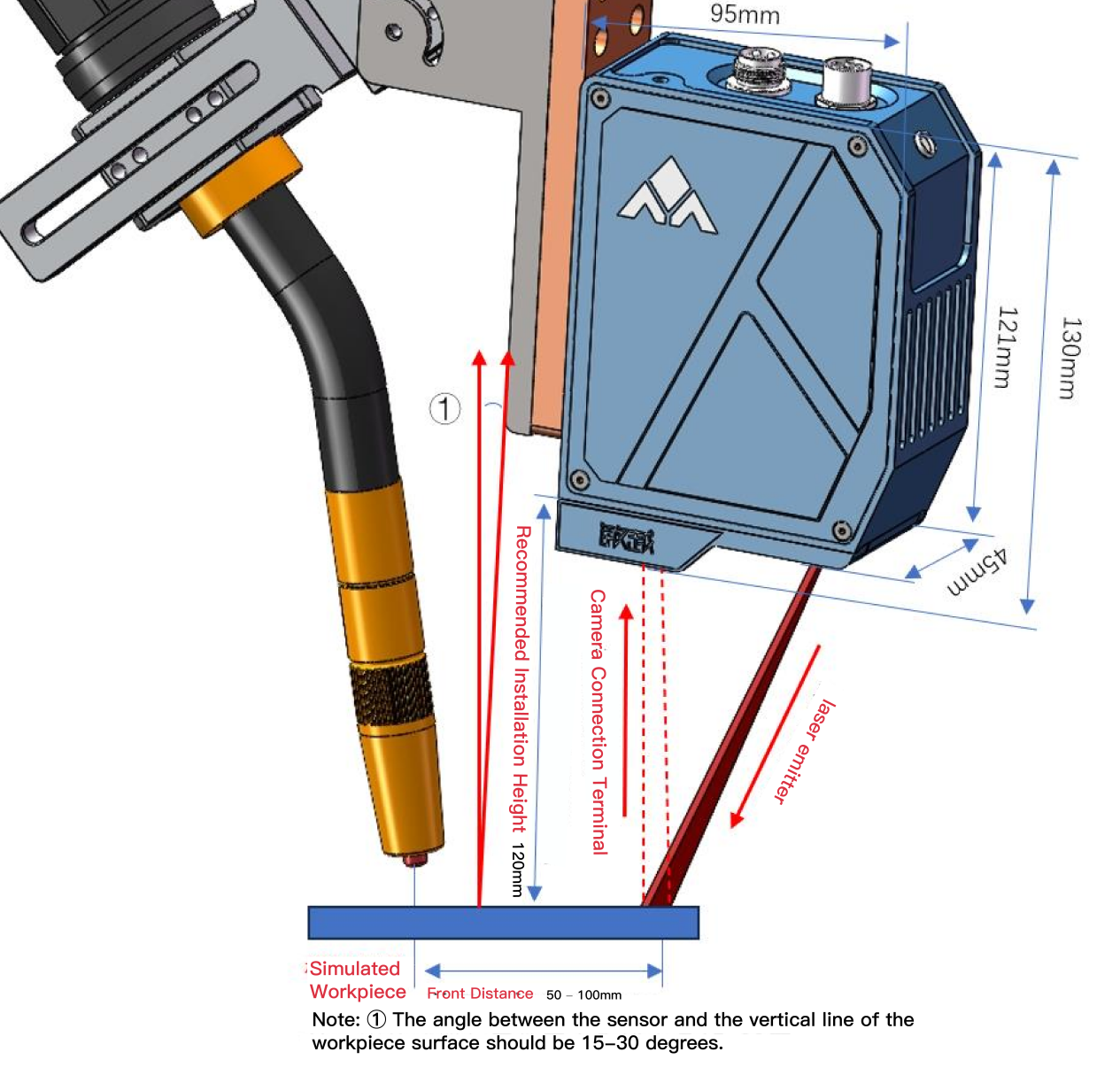
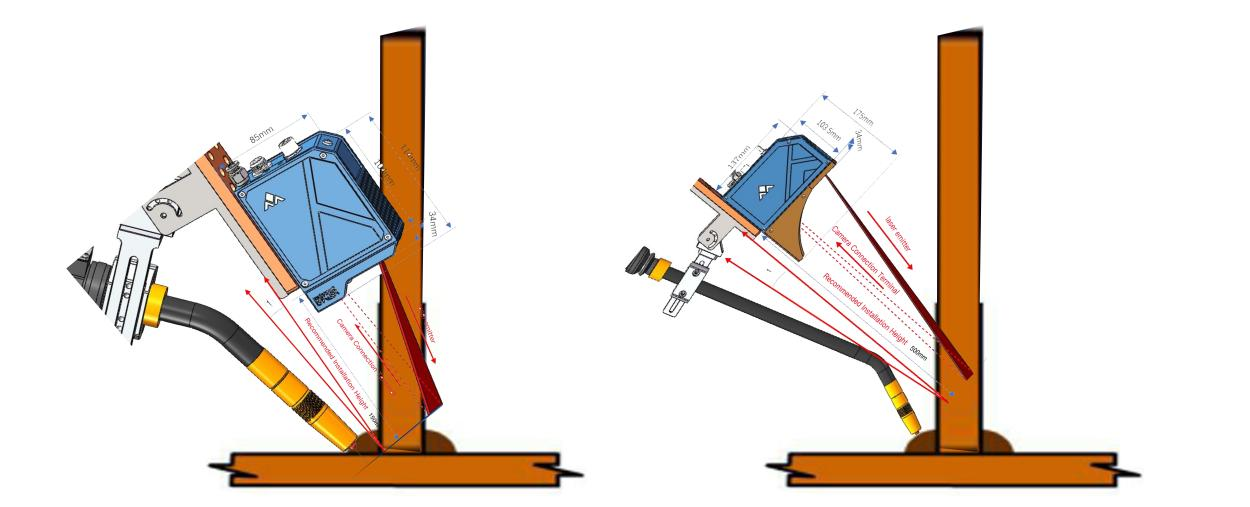
المسافة المثلى للمراقبة هي حوالي 120 مم.
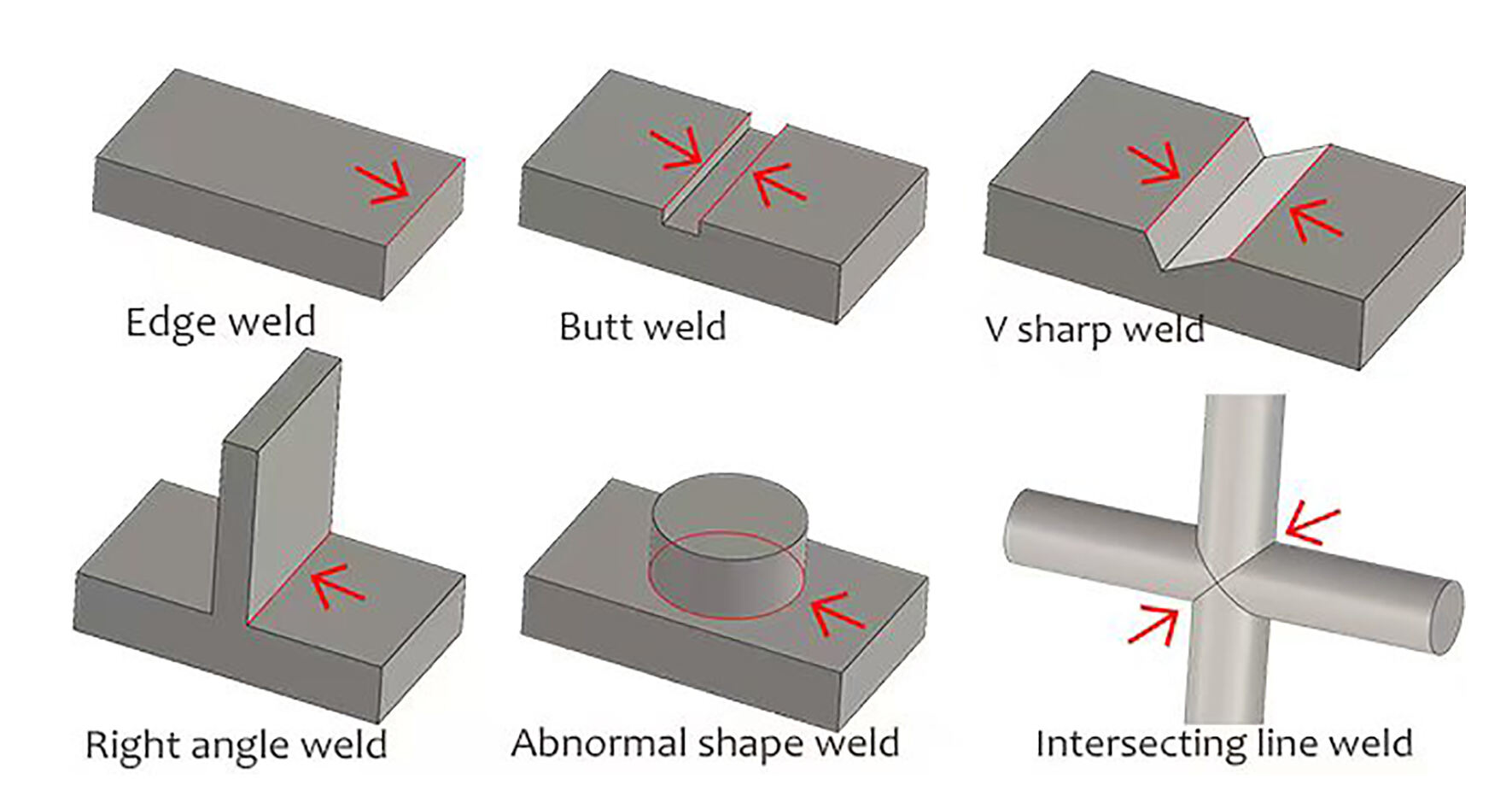
نوع اللحام المدعوم
لحام الشق V
لحام الزاوية
لحام التدوير
لحام الالتحام
لحامات التداخل، إلخ.
دقة عالية، لحام بدون انحناء. مناسب لصناعة اللحام الفولاذ المقاوم للصدأ.
مع ضوء ليزر أزرق لتعكس الضوء العالي، والبيئة اللامعة. مصممة خصيصًا لعملية لحام الألمنيوم باستخدام الليزر.
يرجى اختيار النوع بشكل معقول بناءً على نطاق التطبيق الفعلي، لتجنب اصطدام قطعة العمل بالمستشعر، عادةً يحتاج حمل الروبوت إلى 20 كجم.
الشريك التعاوني

يدعم علامة الروبوت







