 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



SLHA-120 Laser naipevolgsensor
Met posisiebepaling, reële tyd naspoor, skandeer en outomatiese welvoegfunksie.
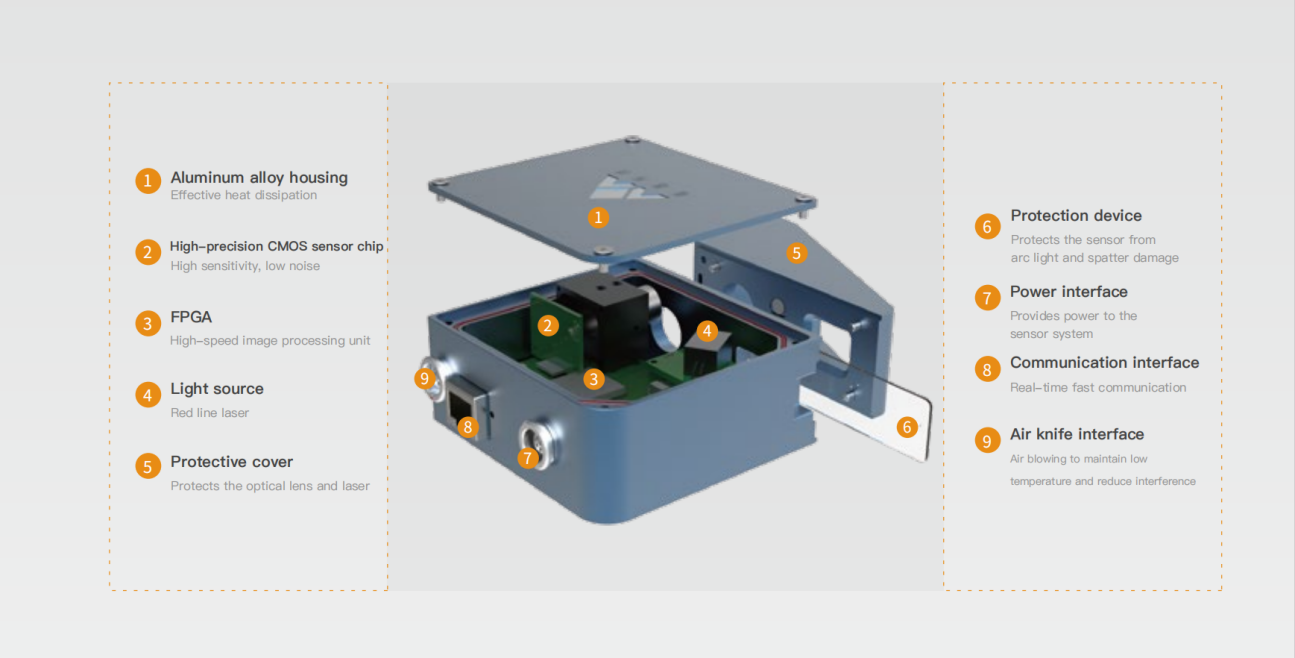
- Oorsig
- Ondersteun robotmerk
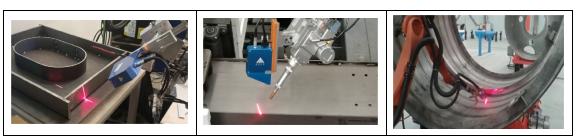
Die laserspoorvolgsensor gebruik 'n laser om die oppervlak van die soldeerspoor te besienig en 'n laserligband te vorm, wat deur 'n hoëdefinisie kamera ontvang en geïmagineer word. Deur algoritmiese verwerking word die driedimensionele kenmerke van die soldeerspoor in gestruktureerde inligting verander, insluitend soldeerstukkoördinate, miswysing, openinge, ens. Hierdie inligting word na die robotbestuurder oorgedra, wat die robot verskaf met die nodige trajek en prosesparameters vir soldeerwerk, wat die robot lei om in real-time werkstukkenafwykings te korrekteer en perfekte soldeerwerk te verseker. In vergelyking met ander oplossings het laser spoorvolg die voordele van nie-kontak, hoë akkuraatheid, spoedige werking en goeie aanpasbaarheid.

Die sensor gebruik lineêre gestruktureerde ligmeting, wat vinnige lynbeelde vorm, geen kontak maak en geen meganiese beweging het; Sterk aanpasbaar, in staat om naadparameters uit te stuur; Volledig ingebed, met eksterne industriële beheerkompute en vele ander voordele, word dit wyd in verskillende tipes outomatiese skerwing gebruik. Onsverskillelike skerwingsprosesse, kan ons betroubare ondersteuning en stabiele prestasie bied om uitstekende resultate in verskillende skerwingsituasies te verseker.
Volledige grafiese sagtewarekoppelvlak, parametersettingsproses, helpmenubedrywing, ook nie-professionals kan vinnig begin
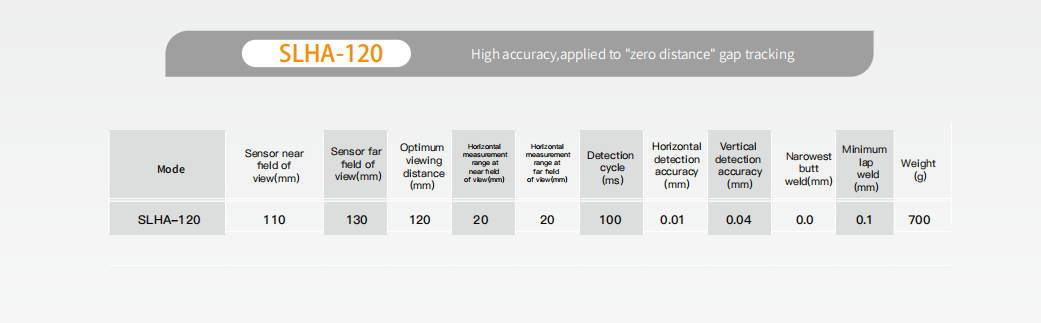
*Nulopeningdeteksie verwys na sensore wat hierdie funksie ingesluit het, wat gebruik kan word om openinge onder 0.1mm te identifiseer
*Sight distance is slegs vir verwysing en kan volgens spesifieke gebruikersbehoeftes aangepas word
Die sensor is geskik vir die eisigste toepassings, aangesien dit ongevoelig is vir straalloos, water en stof (IP67) en ongevoelig teen elektromagnetiese straling (EMC).
Met kragtige funksie.
01. posisie- en afwykingskorreksie
Die posisie- en afwykingskorreksiefunksie word gebruik vir vloeië skerwingsituasies van verskillende werfstukke met dieselfde model, maar onkonsekwente toleransies. Hierdie funksie verseker dat geen handmatige ingryping vereis word wanneer werfstukke oorgeskakel word, en die robot word deur die posisie- en afwykingskorreksiesisteem aangestuur om presiese skerwing te bereik.
Twee-punt-posisionering geskik vir reguitlyn 2D-verskuif-skerwings.
Multi-Punt Posisionering Geskik vir meersegment 2d afstandswelds
Segment Posisionering Geskik vir meersegment 3d afstandswelds.
02 Reële Tyd Volgsysteem
Die reële tyd volgsisteemfunksie word in weldingsituasies gebruik wat hoë doeltreffendheid en geen ruimtelike interferensie vereis. Die sensor is vasgemaak relatief tot die weldingstou, en die weldingstou pas die weldingpad outomaties aan volgens die 3D koördinaatdata.
03.Skandeer en outomatiese welde
Die skannings- en outomatiese weldingsfunksie laat toe dat die sensor eers geometriese inligting van die welds versamel. Hierdie funksie is geskik vir hoë-reflektiewe, smal weldingruimtes en komplekse weldingsituasies.
Laser Seam Tracking
Laser Seam Tracking kan hoë, lae en links-en-regsweldingsafwykings opspoor.
Kan kleinspleetverbindingswelds opspoor.
Los die probleem van seam-tracking vir dunplaatverbindingswelding op.
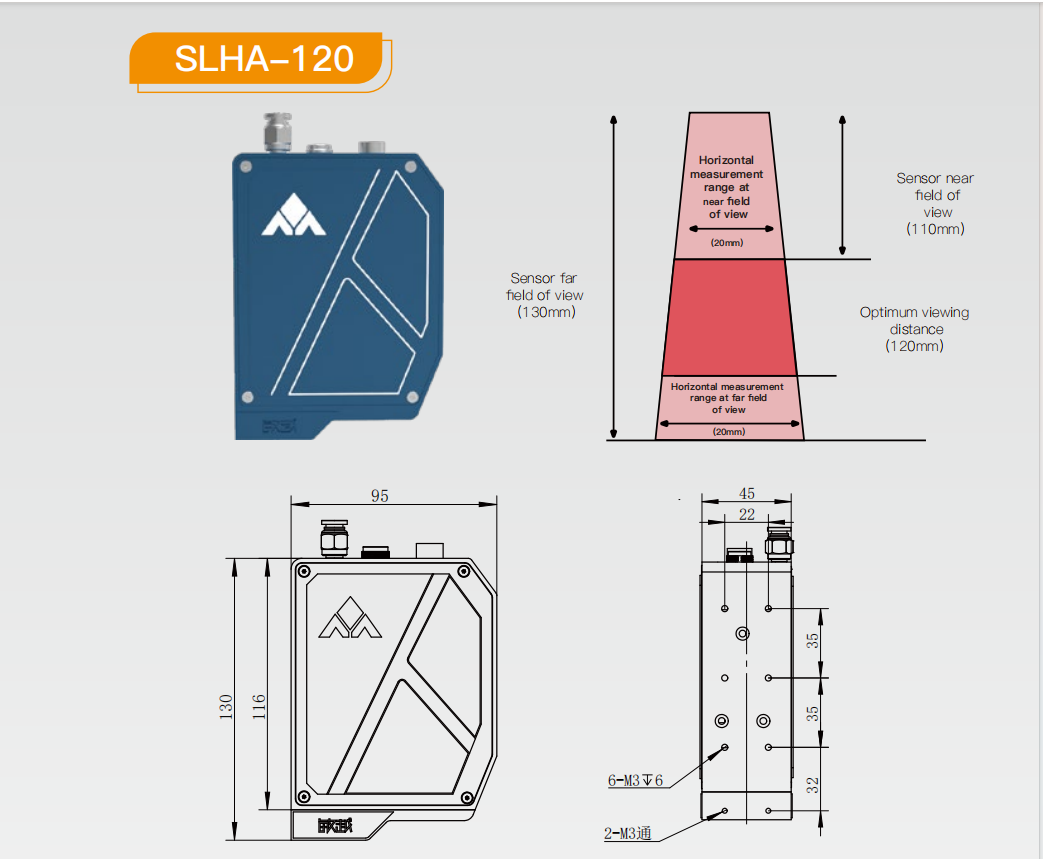
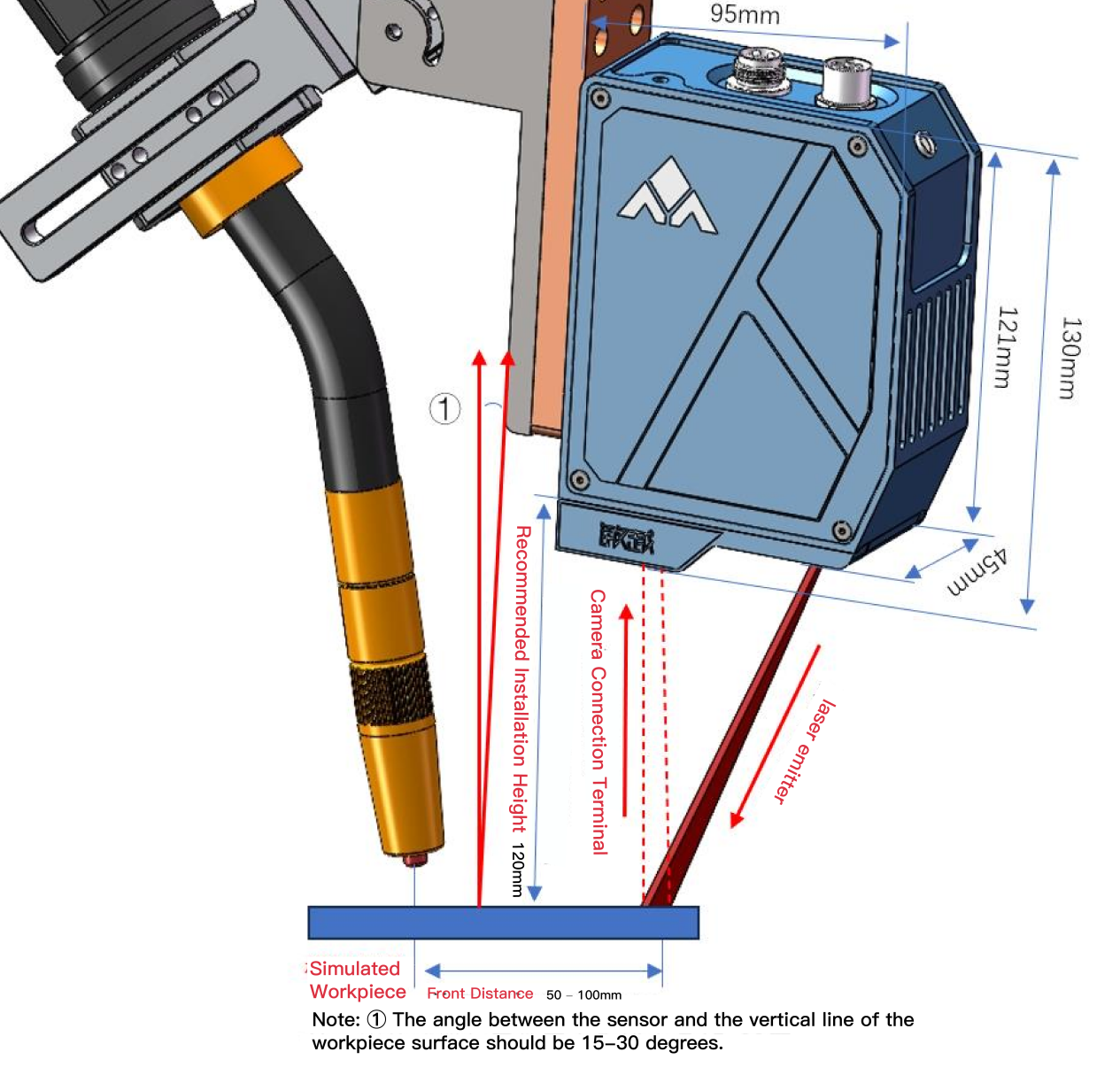
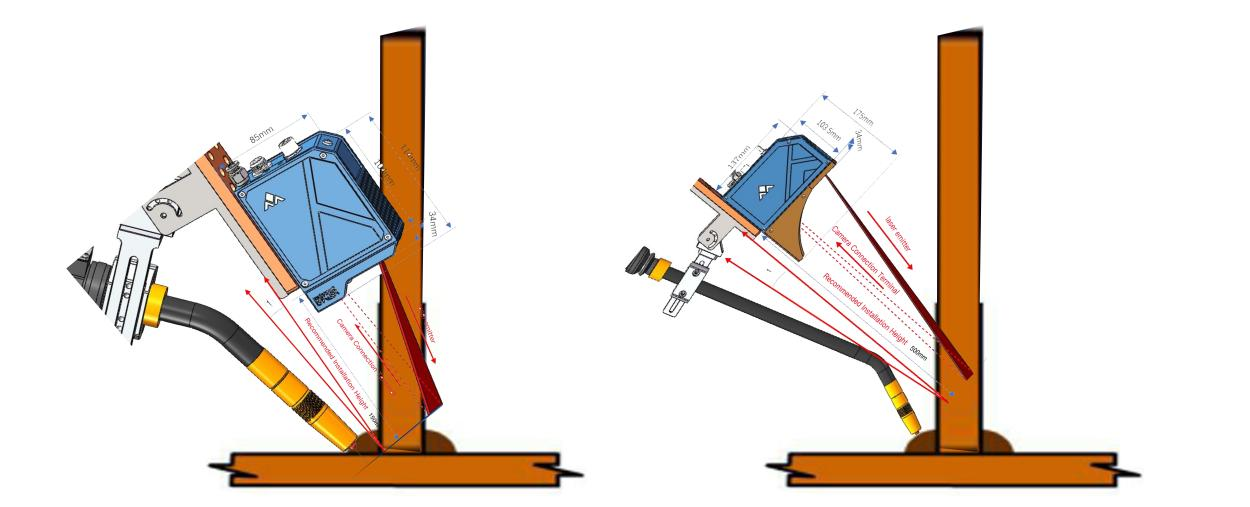
Die ideale waarnemingsafstand is ongeveer 120 mm.
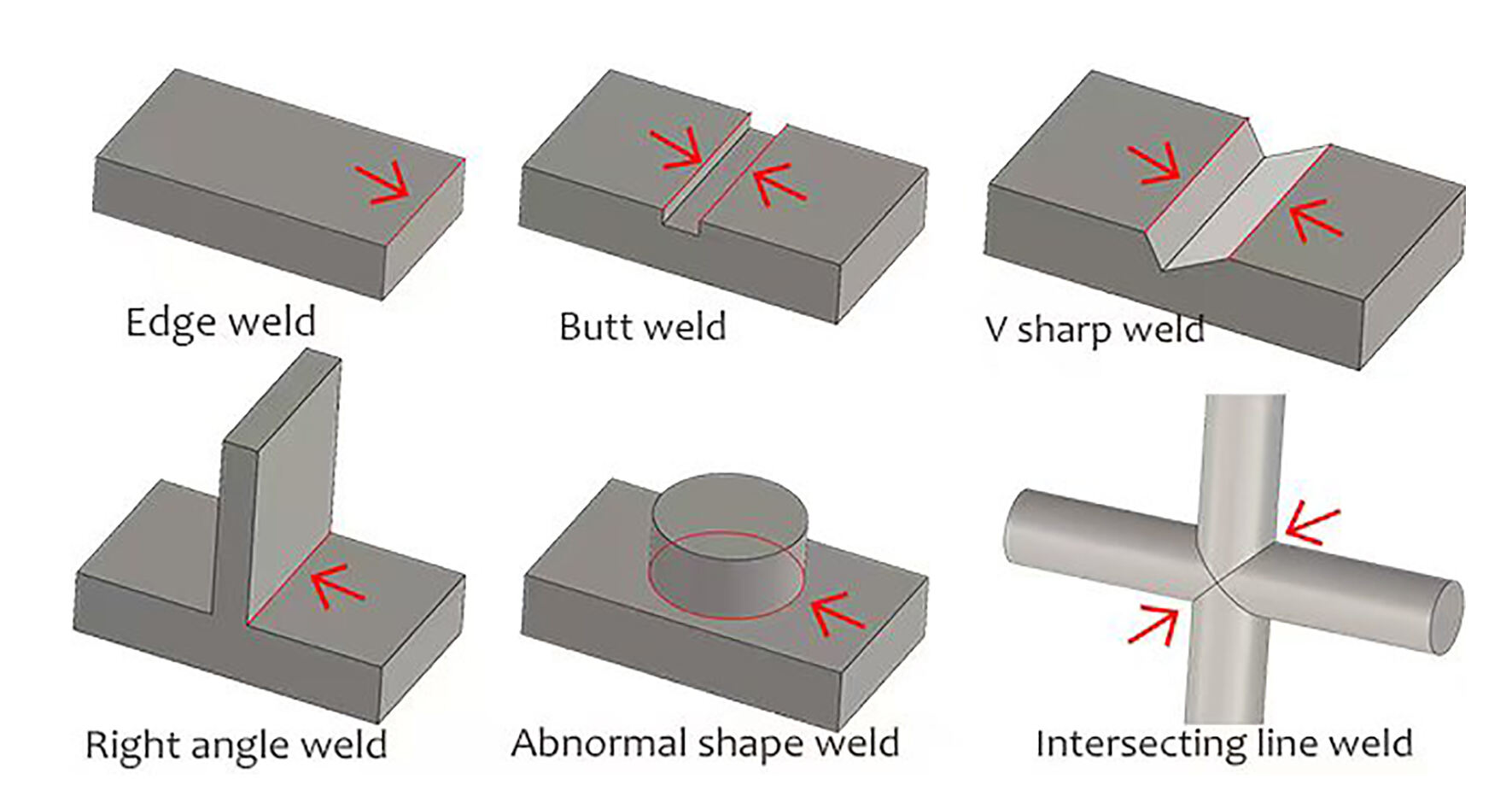
Steunweldtipe
V-groefweld
Hoekweld
Randweld
Spoelingweld
Oorlegwelds, ens.
Hoë presisie, nul-pitch soldeernae. Geskik vir roestvrystaaistelde industrie.
Met blou laserlig vir hoë refleksielig en glinsterende omgewings. Spesiaal ontwerp vir laserwelding van aluminiumlegaas in die weldingsproses.
Kies asseblief die tipe redelik volgens die werklike toepassingsomvang, om werksstukbotsing met die sensor te vermy; die robotbelasting behoort gewoonweg 20KG te wees.
Samewerker

Ondersteun robotmerk







