EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



- Oorsig
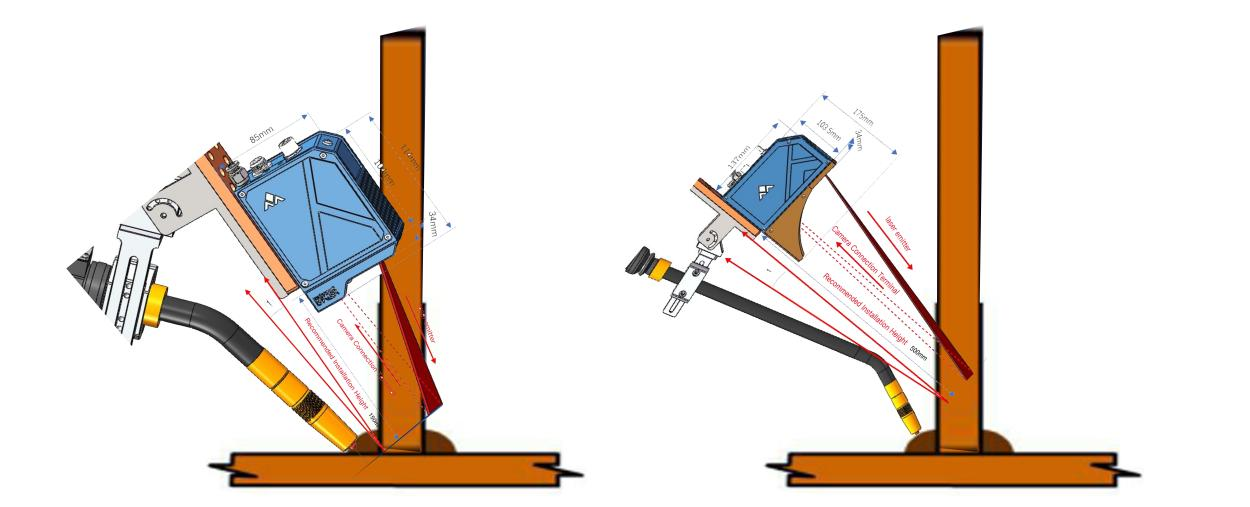
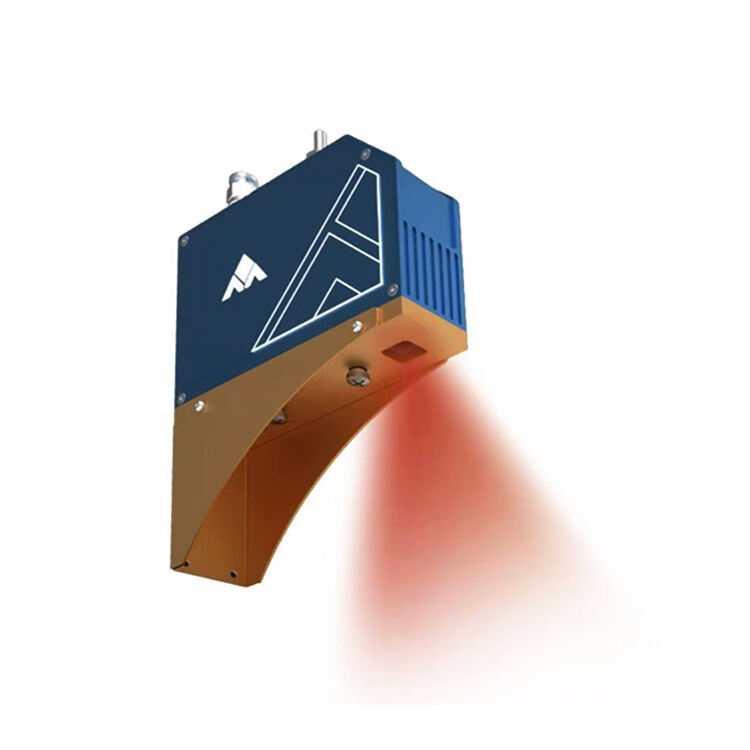
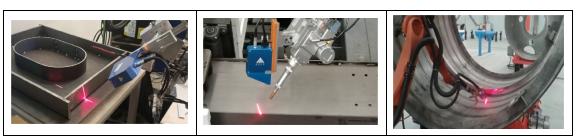
Die lasernaatvolgsensor gebruik 'n laser om die oppervlak van die sweisnaat te bestraal om 'n laserligband te vorm, wat deur 'n hoëdefinisiekamera ontvang en afgebeeld word. Deur algoritmiese verwerking word die driedimensionele kenmerke van die sweisnaat omskep in gestruktureerde inligting, insluitend sweislaskoördinate, wanbelyning, gapings, ens. Hierdie inligting word na die robotbeheerder oorgedra, wat die robot van die vereiste trajek- en prosesparameters voorsien vir sweiswerk, die robot lei om werkstukafwykings in intydse sweiswerk te sweis of reg te stel, en sweiswerk. In vergelyking met ander oplossings, het lasernaatopsporing die voordele van nie-kontak, hoë akkuraatheid, vinnige spoed en goeie aanpasbaarheid.

Die sensor neem lineêre gestruktureerde ligmeting aan, wat vinnige lynbeeldspoed, geen kontak en geen meganiese beweging het nie; Sterk aanpasbaarheid, in staat om sweisnaatparameters uit te voer; Volledig ingebed, met eksterne industriële beheerrekenaars en baie ander voordele, word dit wyd gebruik in verskillende tipes outomatiese sweiswerk. Ongeag die sweisproses, kan ons betroubare ondersteuning en stabiele werkverrigting verskaf om uitstekende resultate in verskillende sweisscenario's te verseker.
Volledige grafiese sagteware-koppelvlak, parameterinstellingsproses, hulpkieslysbesonderhede, nie-professionele persone kan ook vinnig aan die gang kom
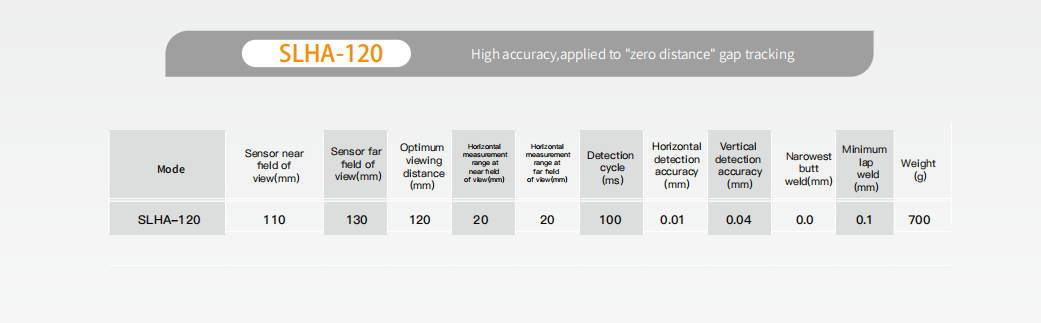
*Nul gapingsopsporing verwys na sensors wat met hierdie funksie toegerus is, wat gebruik kan word om gapings onder 0.1mm te identifiseer
*Sigafstand is slegs vir verwysing en kan aangepas word volgens spesifieke gebruikerbehoeftes
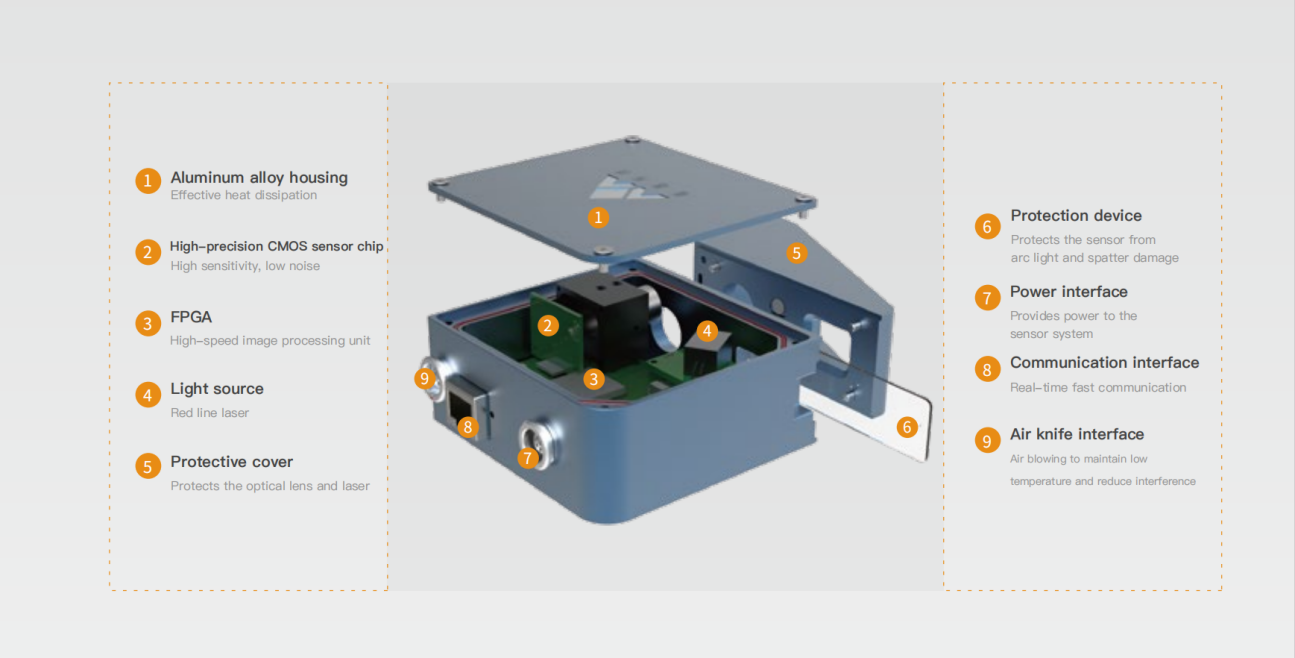
Die sensor is geskik vir die mees veeleisende toepassings, aangesien dit ongevoelig is vir verdwaalde lig, water en stof (IP67) en immuun teen elektromagnetiese straling (EMC).
Met kragtige funksie.
01. posisie en afwyking regstelling
Die posisionering en afwyking regstelling funksie word gebruik vir buigsame sweis scenario's van verskillende werkstukke met dieselfde model maar inkonsekwente toleransies. Hierdie funksie verseker dat geen handmatige ingryping nodig is wanneer werkstukke gewissel word nie, en die robot word gelei deur die posisionering- en afwykingkorreksiestelsel om presiese sweiswerk te verkry,
Twee-punt posisionering geskik vir reguitlyn 2D offset sweislasse.
Multi-punt posisionering Geskik vir multi-segment 2d offset sweislasse
Segmentposisionering Geskik vir multi-segment 3d offset sweislasse.
02 Intydse dop
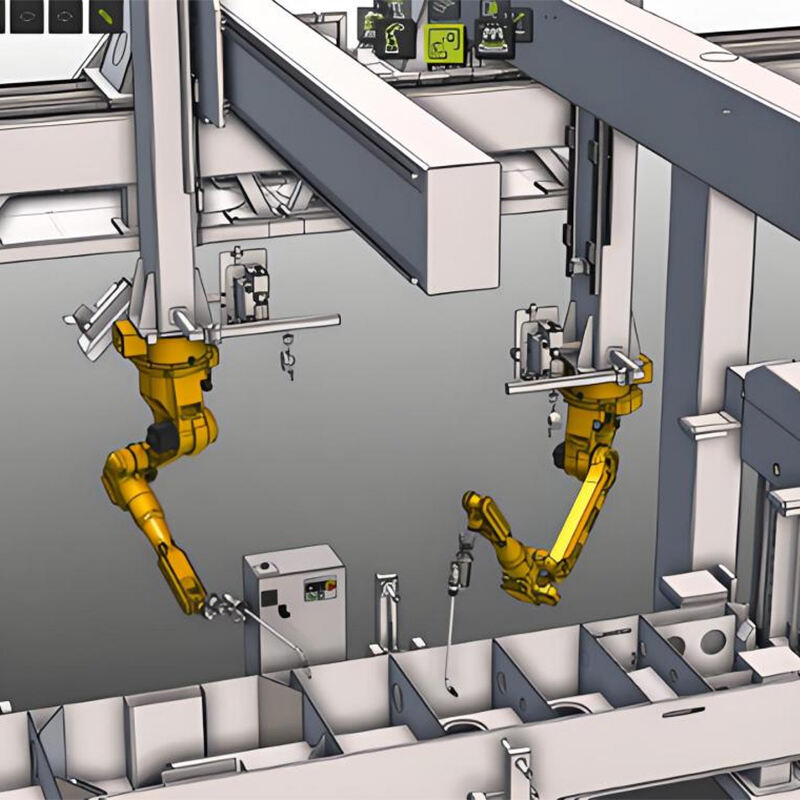
Die intydse opsporingsfunksie word gebruik in sweisscenario's wat hoë doeltreffendheid en geen ruimtelike inmenging vereis nie. Die sensor is vas in verhouding tot die sweisvlam, en die sweisvlam pas outomaties die sweispad aan volgens die 3D-koördinaatdata.
03.Skandering en outomatiese sweiswerk
Die skandering en outomatiese sweisfunksie laat die sensor toe om eers meetkundige inligting van die sweislasse in te samel. Hierdie funksie is geskik vir hoë-reflektiewe, smal sweisruimtes en komplekse sweisscenario's.
Laser naat dop
Lasernaatsporing kan hoë, lae en linker- en regtersweisafwykings opspoor.
Kan sweislasse met klein gapings opspoor.
Los die probleem op van sweisnaatsporing vir dunplaatsplywing.
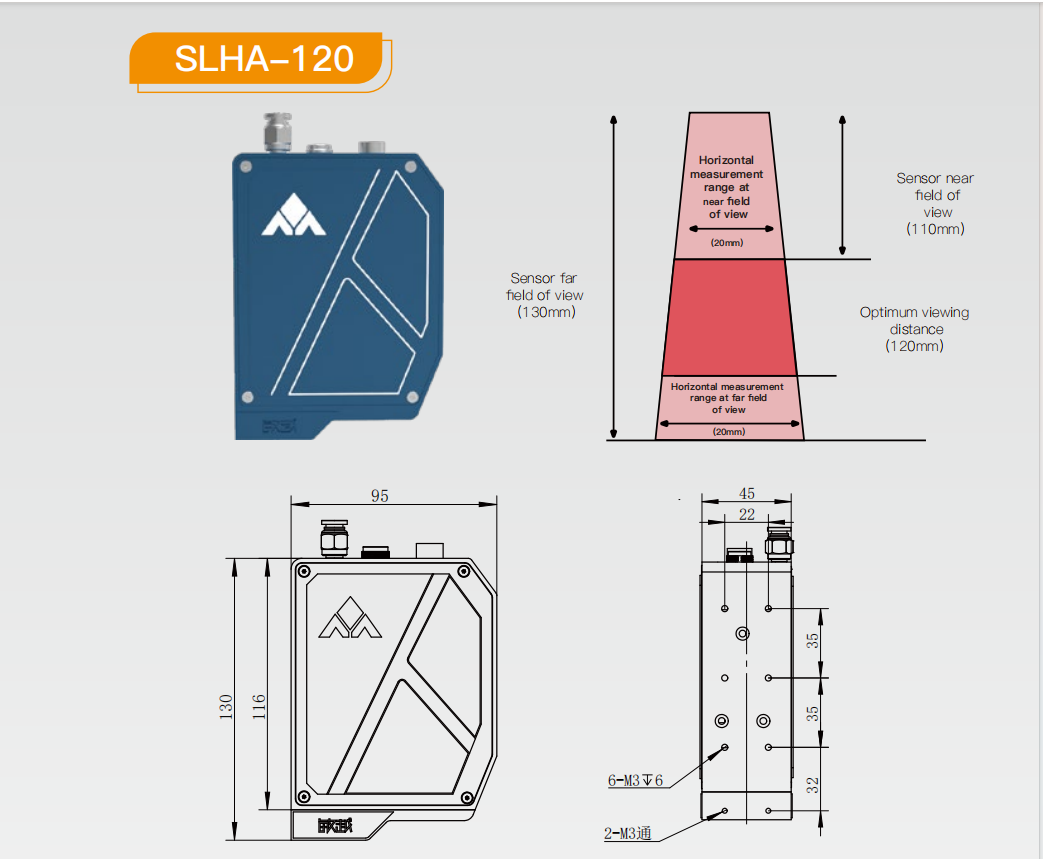
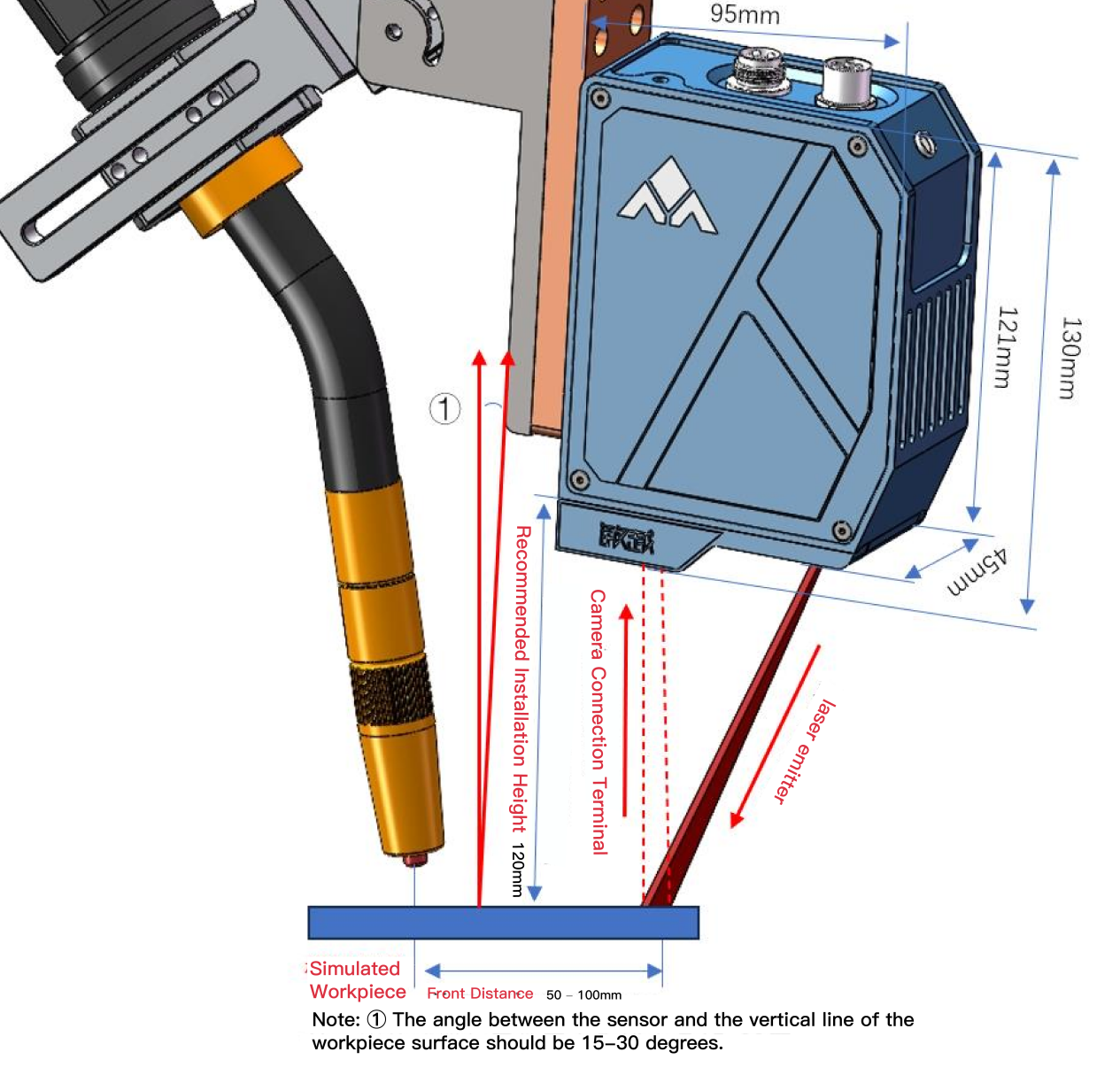
Die optimale waarnemingsafstand is ongeveer 120 mm.
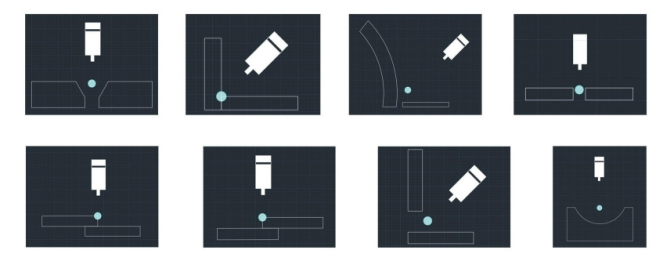
Ondersteun sweis tipe
V-groef sweislas
Fillet sweislas
Omsweislas
Splitsingslas
Skootsweislasse, ens.
Hoë presisie, geen steek sweislasse. geskik vir vlekvrye staal gelaste industrie.
Kies asseblief die tipe redelik volgens die werklike omvang van die toepassing, om werkstuk botsing sensor te vermy, robot vrag gewoonlik gewoonlik 20KG nodig.