 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


หุ่นยนต์เชื่อมอัจฉริยะแบบ龙门สำหรับโครงสร้างเหล็กที่ไม่ต้องสอน

หุ่นยนต์เชื่อมโครงสร้างเหล็กแบบ龙门
อุปกรณ์นี้เป็นหุ่นยนต์เชื่อมสำหรับโครงสร้างเหล็กที่ออกแบบเฉพาะสำหรับการผลิตอัตโนมัติในโรงงานผลิตโครงสร้างเหล็ก
อุปกรณ์นี้เป็นหุ่นยนต์เชื่อมสำหรับโครงสร้างเหล็กที่ออกแบบเฉพาะสำหรับการผลิตอัตโนมัติในโรงงานผลิตโครงสร้างเหล็ก
1. อุปกรณ์ประกอบด้วยหลัก ๆ ได้แก่: ส่วนรางนำทาง ส่วน龙门 ส่วนปรับแต่งหุ่นยนต์ ส่วนกล่องควบคุมไฟฟ้า ส่วนแหล่งพลังงานเชื่อม เป็นต้น
2. ชิ้นส่วนของโครงครอสเบามีองค์ประกอบหลักๆ ได้แก่ เฟรมขับเคลื่อน คานขวาง เฟรมปรับแต่ง เป็นต้น คานขับเคลื่อน คานขวาง และเฟรมปรับแต่งทั้งหมดใช้โครงสร้างการเชื่อมแบบบ็อกซ์บีม จากนั้นจะผ่านกระบวนการลดแรงดึงหลังจากการเชื่อม โครงสร้างกะทัดรัดและดูสวยงาม
3. คานขับเคลื่อนแบบแอคทีฟของเครื่องทั้งหมดใช้ไดรเวอร์เซอร์โว AC และมอเตอร์จาก Panasonic ประเทศญี่ปุ่น เพื่อขับเคลื่อนเกียร์ทดรอบ SHIMPO ของญี่ปุ่น จากนั้นผ่านระบบส่งกำลังแบบเฟือง spur โดยมีล้อไกด์แนวนอนติดตั้งอยู่บนด้านข้างของคานขับเคลื่อน ล้อไกด์สามารถถูกกดให้แนบกับรางไกด์โดยการปรับแกน эксเซนทริก ซึ่งช่วยให้มั่นใจในเสถียรภาพและความแม่นยำของการทำงานของเครื่องทั้งหมด
4. เส้นทางเลื่อนของรถเข็นทั้งหมดทำจากเหล็ก 38KG/M เส้นทางด้านนอกมีเฟืองที่ถูกขัดแต่งอย่างแม่นยำ เฟืองนี้ทำจากเหล็ก 45 ขนาดโมดูล 2.0 โดยใช้วิธีขับเคลื่อนแบบสองด้าน เส้นทางถูกติดตั้งผ่านแผ่นรองแผ่นกด การติดตั้งในลักษณะนี้สามารถรับประกันพารามิเตอร์ทางเทคนิคสำคัญ เช่น ความตรงตามแนวและขนานของเส้นทางทั้งสองเส้น
การสนับสนุนสำหรับการเชื่อมอัจฉริยะแบบไม่ใช้การสอนแบ่งออกเป็นประเภทการนำเข้าภาพวาด 3D การสกัดข้อมูลรอยเชื่อมโดยอัตโนมัติ การสร้างวิถีการเชื่อมของหุ่นยนต์โดยอัตโนมัติ การมองเห็นท่าทาง และการตรวจจับการชนของหัวเชื่อมโดยอัตโนมัติ
การสร้างวิถีการเชื่อมของหุ่นยนต์โดยอัตโนมัติ การมองเห็นท่าทาง การปรับปรุงวิถีการเชื่อม และการตรวจจับการชนของหัวเชื่อมโดยอัตโนมัติ
และหากไม่มีแบบ สามารใช้การสร้างแบบจำลองย้อนกลับจากสแกน 3D สร้างแบบ 3D ได้อย่างรวดเร็ว เกิดเส้นทางเชื่อมสำหรับหุ่นยนต์โดยอัตโนมัติ ปรับแต่งเส้นทางเชื่อม มีการแสดงผลท่าทาง การตรวจจับการชนของหัวเชื่อมโดยอัตโนมัติ
พารามิเตอร์
| ความยาวสูงสุดของชิ้นงาน | 11 เมตร |
| ความกว้างของฟลานจ์ | 2.5m |
| ระยะรางเคลื่อนที่ของ龙门 (Gantry) | 2800 มม. |
| กำลังมอเตอร์เคลื่อนที่ของ龙门 (Gantry) | 2x0.75 kW |
| ความเร็วในการเชื่อมเมื่อเคลื่อนที่ของ龙门 (Gantry) | 100-1000 มม./นาที |
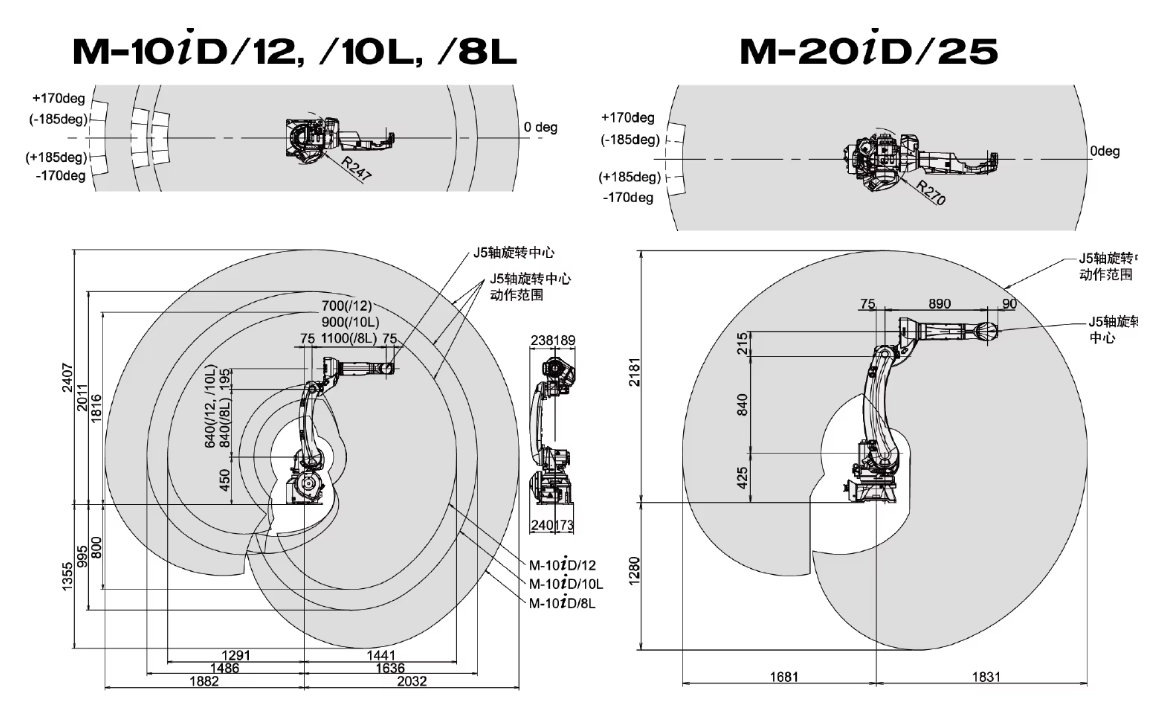
หุ่นยนต์เชื่อม
ใช้หุ่นยนต์เชื่อม FANUC จากประเทศญี่ปุ่น ข้อมูลจำเพาะของหุ่นยนต์มีดังนี้
เครื่องติดตามเลเซอร์ LDWEP-500
LDWEP-500 เป็นเซนเซอร์รอยเชื่อมแบบสแกนเส้นอัจฉริยะ ซึ่งสามารถเก็บข้อมูลรูปทรงของส่วนตัดรอยเชื่อมผ่านการสแกนเลเซอร์แบบเส้น และช่วยนำหุ่นยนต์หรือเครื่องเชื่อมให้ทำการเชื่อมอย่างอัตโนมัติ การเก็บภาพ การประมวลผล และการระบุรอยเชื่อมจะเสร็จสมบูรณ์ภายในเซนเซอร์โดยไม่จำเป็นต้องใช้คอมพิวเตอร์ภายนอก มีความรวมตัวสูงและลดต้นทุนฮาร์ดแวร์โดยรวมของระบบ ทนต่อแสงอาร์กและเศษโลหะจากการเชื่อม สามารถระบุรอยเชื่อมได้อย่างชาญฉลาด และใช้งานง่าย มีโครงสร้างปราณีต ขนาดกะทัดรัด เข้าถึงได้ง่าย และมีหลากหลายประเภท สามารถเลือกใช้งานตามสถานการณ์จริง และปรับแต่งพารามิเตอร์ที่เหมาะสมที่สุดได้

แหล่งพลังงานสำหรับการเชื่อมโครงสร้างเหล็กอุตสาหกรรม H Beam หุ่นยนต์เชื่อม 6-9 แกน จากประเทศจีน
การใช้งานแหล่งพลังงานเชื่อม Megmeet CM500: เครื่องเชื่อมอุตสาหกรรมหนักที่เป็นดิจิทัลเต็มรูปแบบสำหรับการเชื่อม CO2/MAG/MMA แบบอัจฉริยะ เครื่องนี้ถูกใช้งานอย่างแพร่หลายในหลากหลายสาขาของการเชื่อมเหล็กคาร์บอน เช่น การขนส่งทางราง อุตสาหกรรมยานยนต์ การสร้างเรือ โครงสร้างเหล็ก ตู้คอนเทนเนอร์ เครื่องจักร และอุตสาหกรรมฮาร์ดแวร์ นอกจากนี้ยังเหมาะสำหรับการทำงานในสภาพแวดล้อมอุตสาหกรรมที่มีภาระหนักและรุนแรง







