EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


การตัดพลาสม่าแบบเบฟเวลด้วยหุ่นยนต์และวิชั่น 3D
ช่วงการทำงาน:
ร่องบวก:100x100-7000x1200mm@20-45°
เบี้ยวนำ้หน้ากลับ:100x100-6800x1000mm@40-60°
การตัดมุมอัจฉริยะแบบ NON-TEACHING
การตัดและการเชื่อมมุมในกระบวนการก่อนหน้า ปัญหาเรื่องคุณภาพและประสิทธิภาพสามารถทำให้เกิดข้อจำกัดในการผลิตได้ โดยเฉพาะอย่างยิ่งในงานชิ้นส่วนเล็ก การตัดมุมของชิ้นส่วนเล็กในปัจจุบันมักใช้วิธีการตัดด้วยเปลวไฟแบบดั้งเดิม ซึ่งกระบวนการนี้จำเป็นต้องเขียนแบบล่วงหน้า วางตำแหน่ง และตัดมุมด้วยรถตัดเปลวไฟ รวมถึงต้องใช้พื้นที่ทำงานขนาดเล็ก และทุกครั้งที่เปลี่ยนชิ้นงาน จะต้องทำการอุ่นใหม่อีกครั้ง นอกจากนี้ การตัดด้วยเปลวไฟแบบดั้งเดิมยังมีข้อเสีย เช่น มุมตัดไม่สม่ำเสมอ คุณภาพต่ำ ประสิทธิภาพต่ำ ใช้แรงงานมาก และมีขอบเขตการใช้งานจำกัด
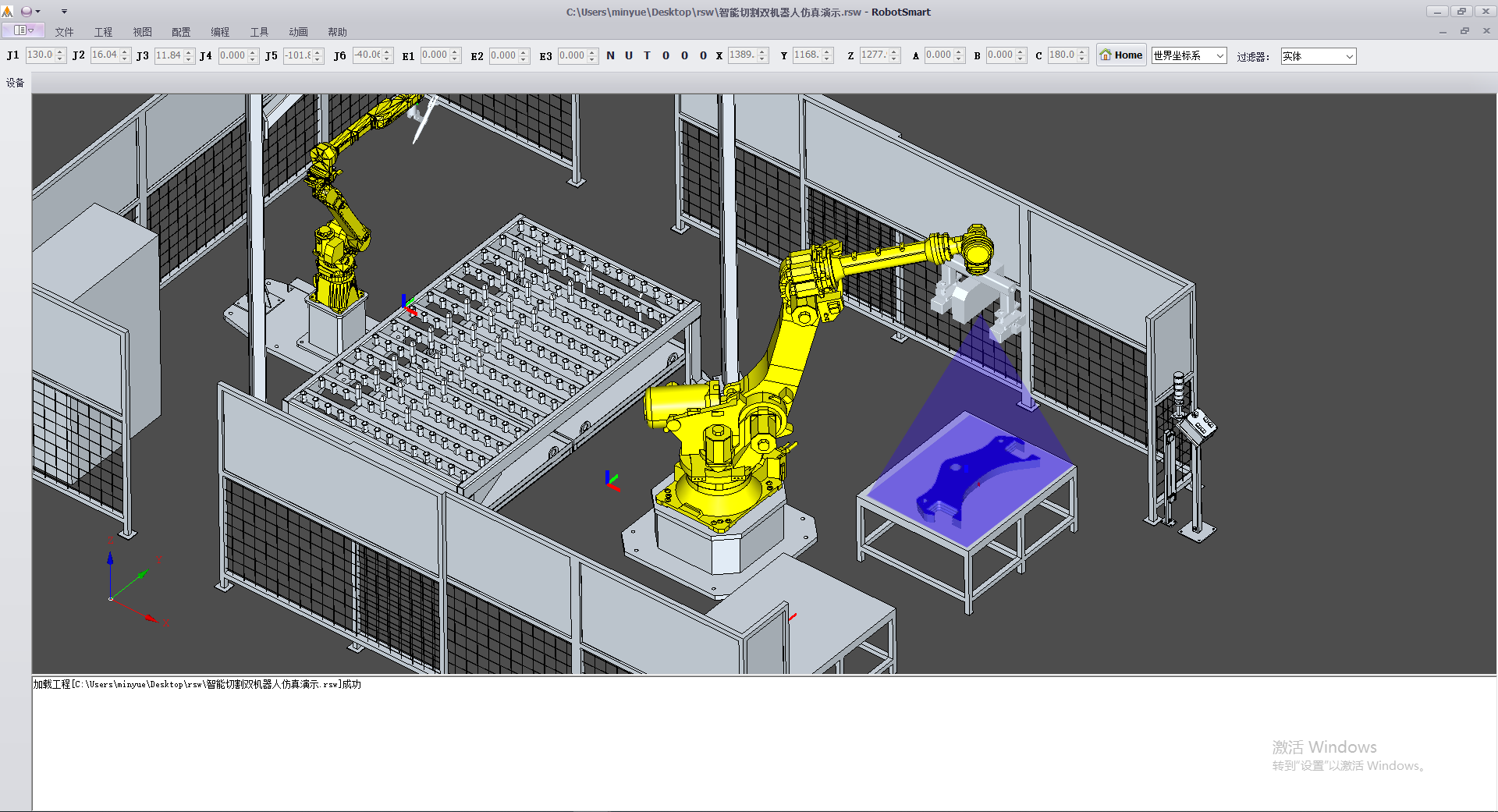
MINYUE TECHNOLOGY การตัด bevelling แบบอัจฉริยะที่ไม่ต้องการการสอนใช้ระบบการตัดสินใจอัจฉริยะ RobotSmart พร้อมระบบวิชั่น 3D SmartVisions และระบบติดตามเลเซอร์ SmartEye เพื่อให้เกิดการตัด bevelling อัจฉริยะด้วย "ไม่ต้องเขียนโปรแกรม + วิชั่น" แก้ปัญหาการผลิตที่ยากต่อการเขียนโปรแกรมและความเป็นอัจฉริยะในระดับต่ำ และยังตอบสนองความต้องการในการตัดชิ้นงานจำนวนมากน้อยแต่มีหลากหลายประเภท ช่วยเพิ่มประสิทธิภาพการประมวลผลและอัตราการสำเร็จงาน

เมื่อเผชิญกับงานที่ซับซ้อนและหลากหลายมากขึ้น จะมีเพียงสามขั้นตอนเท่านั้น
1. นำเข้าไฟล์ CAD DXF; 2. การวางแผนเส้นทางอย่างรวดเร็ว; 3. การสร้างโปรแกรมตัดโดยอัตโนมัติ จากนั้นสามารถดำเนินการตัดได้อย่างรวดเร็ว
การปรับแต่งเส้นทางการตัดอัตโนมัติ การวางแผนเส้นทาง bevelling อย่างชาญฉลาด ไม่มีการตัดย้อนของ bevelling บนและล่าง
กล้องบินอกูลาร์ใช้ถ่ายภาพเพื่อระบุตำแหน่งของชิ้นงานและจับยกไปวางบนโต๊ะตัด เมื่อการตัดเสร็จสิ้น CNC จะไปทำงานที่โต๊ะตัดเพื่อจับ ชิ้นงานหลายชิ้นสามารถปรับให้เหมาะสมพร้อมกันได้ และเส้นทางการตัดจะถูกวางแผนโดยอัตโนมัติ การตัดระยะทางตั้งแต่ 0.5 ถึง 4 เมตร ช่วยเพิ่มประสิทธิภาพและความปลอดภัยในการทำงานอย่างมาก รองรับกระบวนการตัดด้วยเปลวไฟและการตัดด้วยพลาสมา
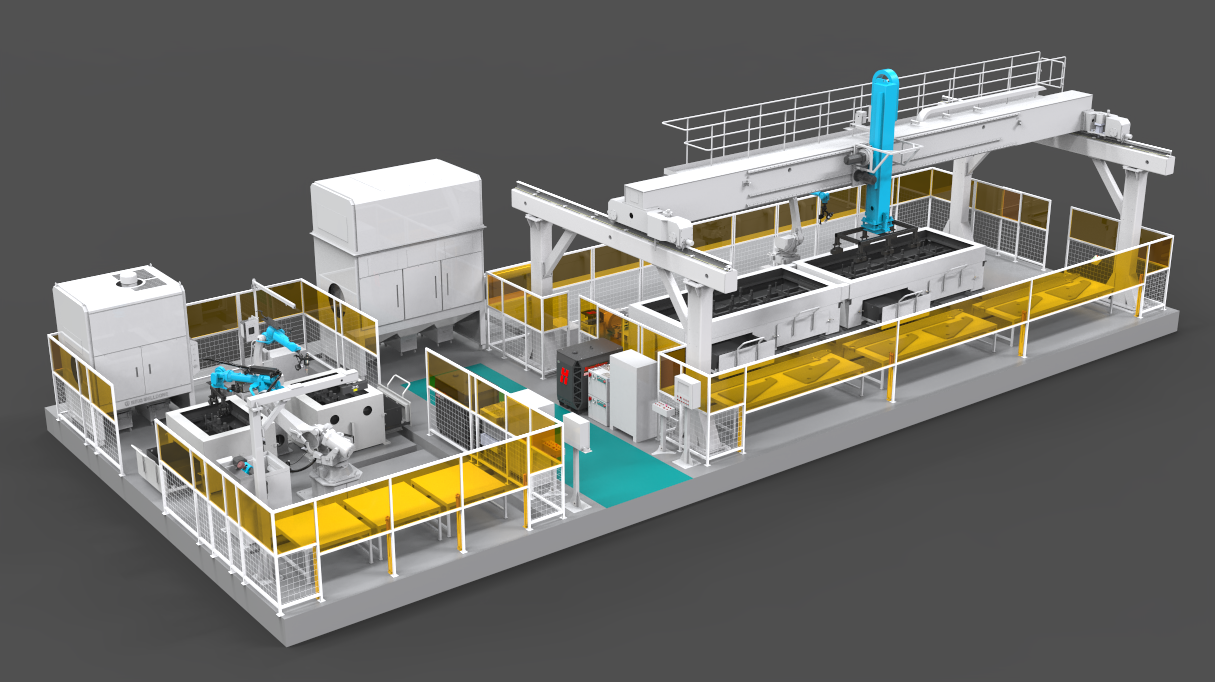
รองรับโหมดการโหลดและการ缷หลากหลายแบบ เช่น การโหลดและการ缷ด้วยมือ การโหลดและการ缷ด้วยเครนแขนยาว การโหลดและการ缷ด้วยเครนเคลื่อนที่ การโหลดและการ缷ร่วมกันด้วยหุ่นยนต์คู่ และการโหลดและการ缷ด้วย CNC
กระบวนการผลิต
● การวางตำแหน่งคร่าวๆ ของชิ้นงานบนโต๊ะตัดด้วยมือ (ความแม่นยำของการวางตำแหน่งชิ้นงานอยู่ในช่วง ±5 มม.)
● การผลิตครั้งแรกผ่านซอฟต์แวร์เพื่อเลือกตำแหน่งการตัดโดยอัตโนมัติ สร้างเส้นทางการตัดและพารามิเตอร์กระบวนการ โปรแกรมที่สร้างขึ้นสามารถเก็บไว้ในระบบควบคุมได้ และสามารถเรียกใช้งานในกระบวนการผลิตครั้งถัดไปได้ทันที (RobotSmart สามารถติดตั้งได้ภายใน 15-20 นาทีผ่านแพลตฟอร์มระบบการตัดสินใจอัจฉริยะ)。
● เรือกลึงหุ่นยนต์ใช้เซ็นเซอร์วิชั่นเลเซอร์เพื่อกำหนดตำแหน่งชิ้นงานอย่างแม่นยำ (ข้อดี: มีประสิทธิภาพและความแม่นยำสูงกว่าเครื่องมือตรวจหาขอบแบบสัมผัส)。
● รองรับสถานีทำงานหุ่นยนต์แบบ Ground Rail Gantry Cantilever
● เปิดตัว 12 โซลูชันสำหรับสถานการณ์การใช้งานที่แบ่งเป็นส่วนต่างๆ
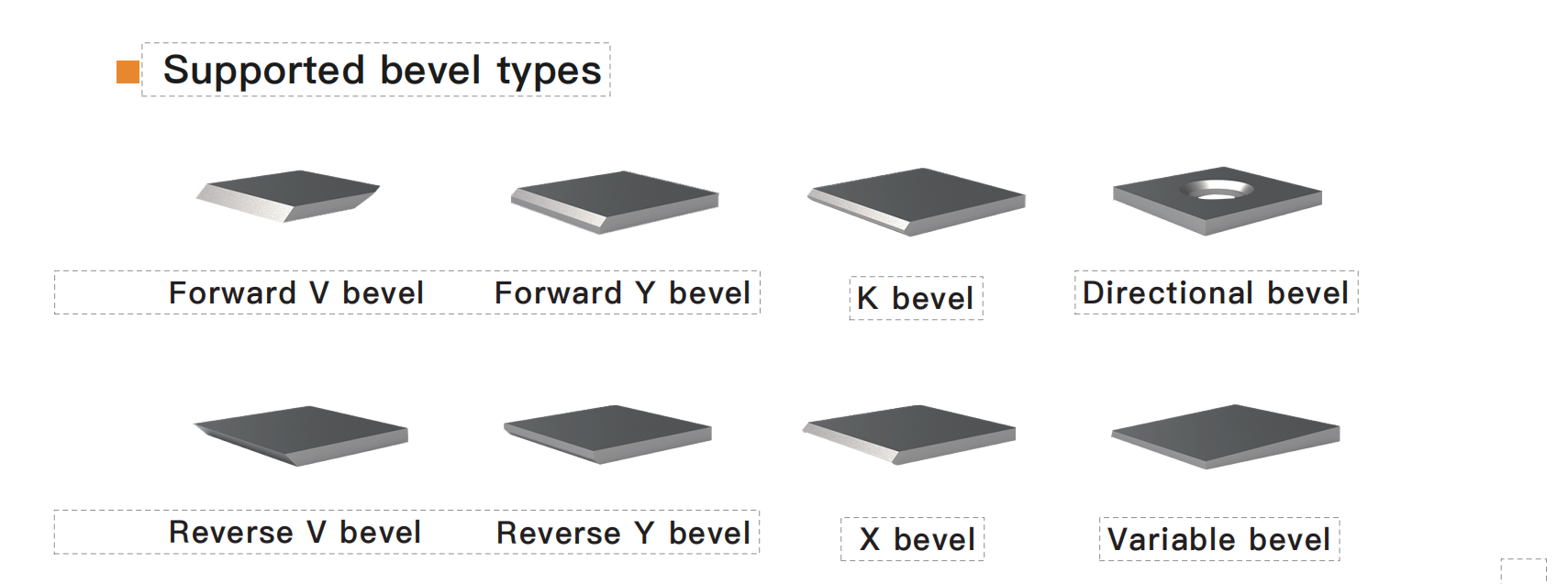
ประเภทการตัดเบี้ยวที่รองรับ