 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Neobrazovni robot za inteligentno svarenje greda od ocele strukture

Robotska stanica za svarenje od čelikastih konstrukcija
Ovo opremno je posebna robotska jedinica za čelikaste konstrukcije prilagođena za automatsku proizvodnju u fabrikama za čelikaste konstrukcije.
Ovo opremno je posebna robotska jedinica za čelikaste konstrukcije prilagođena za automatsku proizvodnju u fabrikama za čelikaste konstrukcije.
1. Oprema se uglavnom sastoji od: delova sa vodiljkom, delova sa portalom, delova za regulaciju robota, električne kontrolne kutije, delova za svarenje i slično.
2. Komponente portala uglavnom se sastoje od pogonskog okvira, poprečne trake i regulacionog okvira. Pogonska traka, poprečna traka i regulacioni okvir koriste strukturu svarenja tipa kutijastog nosača, a zatim prodaju proceduri otpuštanja napona nakon svarenja. Struktura je kompaktna i izgled privlačan.
3. Aktivna vođačka traka celog uređaja koristi japanski Panasonic AC servo dizajler i motor za vođenje japanskog SHIMPO reduktera, a zatim putem rešetke i češlja transmisije, na strani vođačke trake je instaliran horizontalni vodiljaci kotač. Vodiljaci kotač mogu da se pritisnu na vodiljaci railed prilagođavanjem svoje ekscentrične ose, time se osigurava stabilnost i tačnost rada celog stroja.
4. Pomrećne vodiljaci relsova vozila su izrađeni od 38KG/M. Spoljne strane vodiljaca relsova su opremljene precizno obradjenim rešetkama. Rešetka je izrađena od čelika 45 sa modulom od 2.0. Koristi se bilateralni način vođenja. Vodiljaci relsova su zakrnjeni kroz ploče za zakrpa. Ovaj način montaže može da osigura važne tehničke parametre kao što su dužinska ravnotina i paralelnost dva vodiljaca relsova.
Подршка за не-наставни интелигентни сваривање се посебно деле у Увођење цртежа 3D цртежа, аутоматско изvlaчeњe швовских језgre, aутоматска генерација траjекториje роботa за сваривање, визуелизација става, аутоматско оtkрићe сукoбa сваривачког пистолета.
Аутоматска генерација траjекториje роботa за сваривање, визуелизација става, оптимизација сваривачке траjекториje, аутоматско оtkрићe сукoбa пистолета.
И без цртежа тип, 3D скенирање реверзне моделовање, брза генерација 3D цртежа, аутоматска генерација траjекториje роботa за сваривање, оптимизација сваривачке траjекториje, визуелизација става, аутоматско оtkрићe сукoбa сваривачког пистолета.
Parametar
| Максимална дужина радног дела | 11M |
| Ширина прирубнице | 2.5m |
| Прмер гондоле | 2800 мм |
| Снага мотора покретања гондоле | 2x0.75 kW |
| Брзина сваривања покретања гондоле | 100-1000 mm/min |
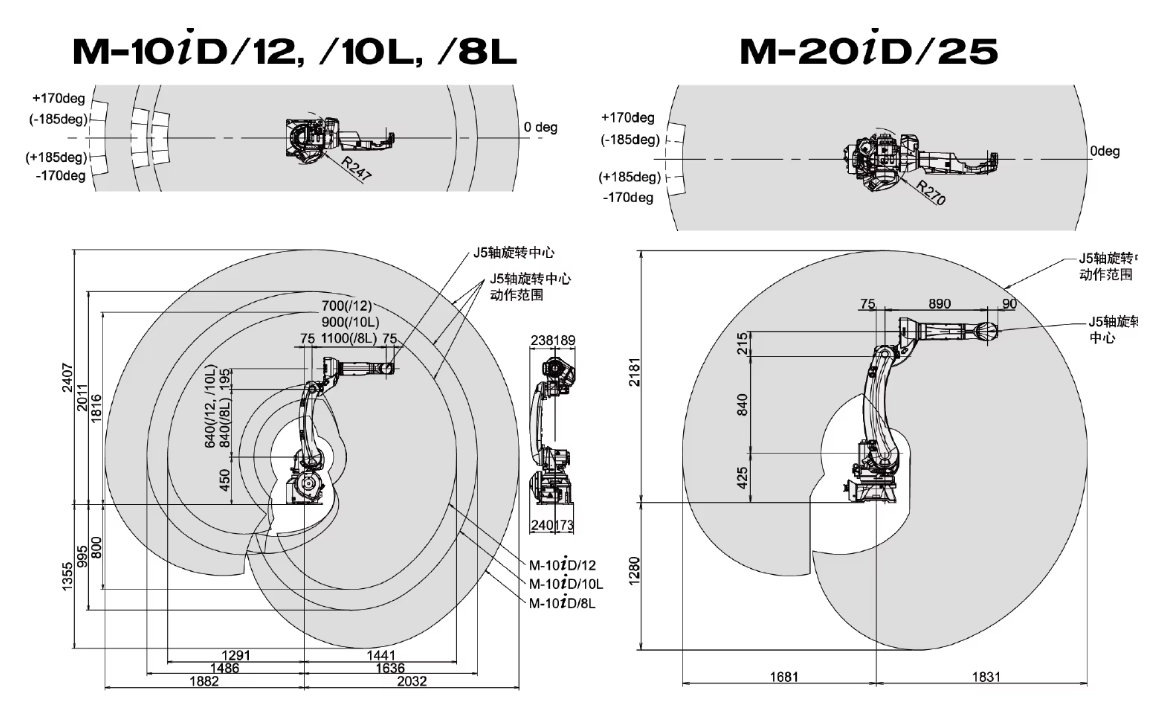
Zavarivački robot
Koristi se FANUC savijalni robot iz Japana. Specifični parametri robota su sledeći.
LDWEP-500 laser traker
LDWEP-500 je inteligentni linerni skenirajući senzor za spojeve za varanje. Dobija informacije o konturu preseka spoja za varanje kroz linerni laser skeniranje, i vodi robota ili varni stroj da automatski završi varanje. Funkcije pristupa sliki, obrade i identifikacije spoja za varanje su završene unutar senzora bez potrebe za vanjskim računarom. Ima visok stepen integracije i smanjuje ukupne troškove hardvera sistema. Oporan je svetlosti arka i prskajućim česticama, inteligentno prepoznaje spojeve za varanje, a lako se operiše. Imaju elegantnu konstrukciju, kompaktnu veličinu, visoku dostupnost i bogatu ponudu. Može se odabrati i koristiti prema aplikacionom scenariju, a mogu se prilagoditi najpogodniji parametri.

Izvor snage za varanje Stalna ocelovita industrijska H balvina 6-9 osnovnih stanica za varanje robota Kina
Korišćenje Megmeet CM500 svarkivackog izvora snage: potpuno digitalnog industrijskog teškog CO2/MAG/MMA inteligentnog svarkivačkog stroja. Opširno se koristi u različitim oblastima obrade ugljikovitog čelika: u saobraćaju na vretnici, automobilskoj industriji, brodogradnji, čelikovnim konstrukcijama, kontejnerima, mašinstvu, metalu i drugim industrijama, kao i u industrijskim teškim opterećenjima i ekstremnim uslovima rada.







