 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Stanica inteligentného svarovacieho robota typu podlahové dráhy pre kravcové konštrukcie

Robót pre spájanie s typom zemného vodiča je vybavený inteligentným systémom spájania Friendess non-teching a širokou vizuálnou vzdialenosťou pre sledovanie šva. Môže priamo importovať 3D modelové súbory z Tekly, SolidWorks alebo UG, priamo zarovnať parametre spájacieho procesu, automaticky identifikovať presnú pozíciu spájaného švu a vygenerovať najlepšiu optimalizovanú spájacia technologiu na spájanie.
Osa pohybu s typom zemného vodiča zvyšuje prispôsobivosť v dĺžkovom smere. Robót môže byť spojený so zemným vodičom na spájanie dlhších švov naraz, a stanica môže pracovať na ľavej a pravej strane vodiča. Predovšetkým sa používa na spájanie nosných plátov H-ťažnice, základných plátov stĺpov, nosných plátov prenosiek, konsolí a iných štruktúr.
| Robot | 1 sada robóta Fanuc |
| Voliteľné zdroje na spájanie | Spájačská strojnícka jednotka Aotai a jej príslušenstvo alebo spájačská jednotka Megmeet a jej príslušenstvo |
| Spájačský systém | Softvér MINYUE bezvodicového programovania spájania offline, laserový vizuálny sledovací systém MINYUE. |
| Aplikovateľné scenáre | Použiteľné pre nosnú desku, korbelové časti, malé konštrukčné časti atď. Momentálne sa dá použiť v H-tvarných hlavných nosniciach a vedľajších nosniciach ocelej konštrukcie, v malých a stredných plátkových jednotkách lodných mostov, vybavení H-tvarných ocelejnosníc, nosníkov platformy vybavenia a iných konštrukcií. |
| Systém na čistenie zbraní | SC220A systém na čistenie zbraní |
| Dĺžka podlazového raile | 6 metrov (voliteľné podľa používateľa) |
Systém na čistenie zbraní
Čistiaci stanica SC220A je zariadenie na čistenie robotických spájacích zbraní. Používa sa na automatické čistenie spájacej hmoty zo spájacej zbrane počas robotického spájaní, automatické rezanie drôtov a ochranu ústia spájacej zbrane a kontaktového bodu, čo predĺži životnosť spájacej zbrane a ušetrí peniaze. Zníženie nákladov na spotrebné materiály, udržiavanie dobré kvality spájaní a zvyšovanie efektívnosti spájaní. Jednoduchá operácia a ľahká použiteľnosť.
Výhody stanic na čistenie zbraní: 1. Čas na čistenie zbrane je krátky a dostupnosť systému je vysoká. 2. Automatické dokončenie procesu čistenia zbrane bez ručnej operácie. 3. Predchádzanie kvalitným problémom spôsobeným kontamináciou počas svarovania. 4. Kompletné s robotickou kalibráciou pomocou TCP jehly.
Softvér pre robotické svarovanie
Softvér môže automaticky extrahovať svarovacie spoje z nákresov bez označenia svarky, čím sa zníži pracovná zátěž manuálneho účasti. S vysoko výkonným 3D enginom a robotickým regulátorom sú automaticky vytvorené body simulované a overené, aby sa vyhli kolíziám počas skutočnej práce.
A bez typu náčrtu, 3D skenovanie a reverzné modelovanie, rýchla generácia 3D náčrtov, automatická generácia trajektórie robotického svarovania, optimalizácia trajektórie svarky, vizualizácia polohy, automatická detekcia kolízie svarovacieho drotu.
LDWP-305 laserový merací systém
LDWP-305 je inteligentný senzor na čiarenkové skenovanie varného šva. Získava kontúrové informácie o rezse varného švu pomocou čiarenkového laserového skenovania a vodi robota alebo varnú stroj, aby automaticky dokončil varu. Funkcie získavania obrazu, spracovania a identifikácie varného švu sú vykonávané vnútri senzora bez potreby externého počítača. Má vysokú integráciu a zníži celkové hardwarové náklady systému. Odolný voči oblúku a varnej trhlinovej mašle, inteligentne identifikuje varné švy a je jednoduchý v ovládaní. Majú precízny dizajn, kompaktné rozmery, vysokú prístupnosť a bohatú ponuku typov. Môžu sa vybrať a použiť podľa aplikovacieho scénaria a môžu byť prispôsobené najvhodnejšie parametre.

Výhoda
1.Podporuje nefunkčné nastavenie pre rôzne produkty, ako sú sendvičové panely, traverzy, závislé konštrukcie, mostové oddelovače a panelové nosiče;
2. V fáze návrhu nie je potrebné označovať spáje, a cieľová pozícia spáju sa môže automaticky extrahovať importom 3D kresiel;
3. Nestratuje sa žiadne ľudské zásahy, robot automaticky dokončí akcie ako návrat na nulu, prechody, hľadanie pozície, spájanie, počítanie a čistenie spájacej hlavky;
4. Nie je potrebná lokálna operácia, program môžete vygenerovať kedykoľvek a odkiaľkoľvek a poslať ho robotovi na výrobu podľa určeného času;
5. Vlastný offline programovací systém, 1:1 simulácia pohybov robota, predem odstráni interferencie robota a zabráni kolíziám;
6. Digitálna dvojčatá technológia môže zobrazovať v reálnom čase trajektoriu robota, spájacie napätie, prúd, rýchlosť a iné informácie o výrobe.
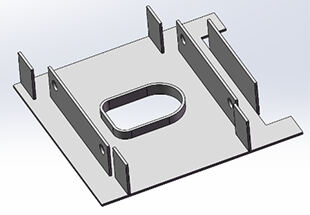
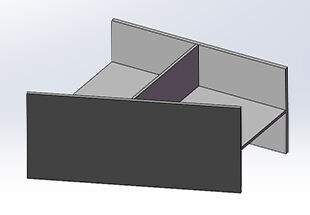
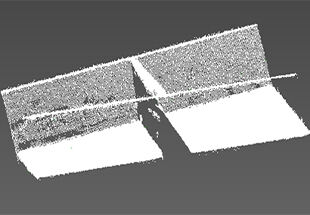
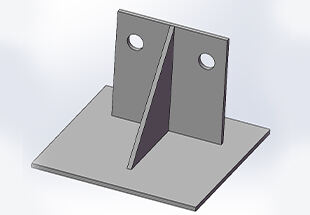
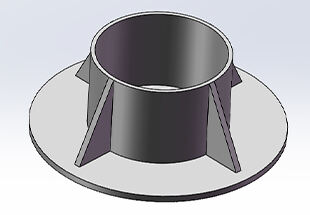
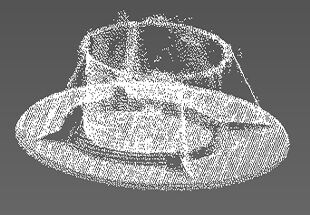
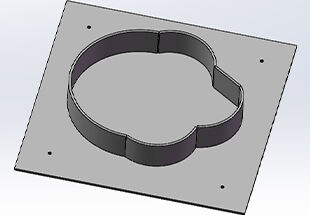
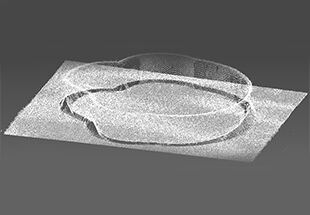
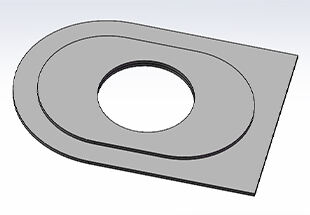
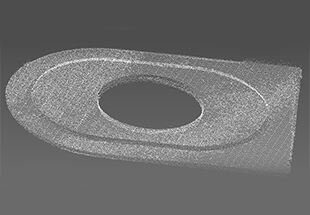
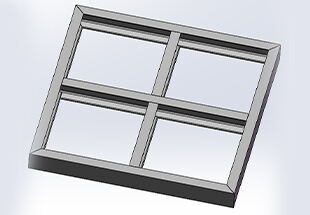
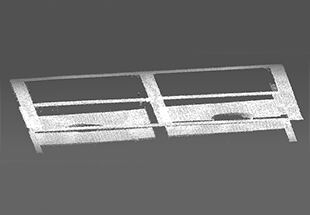
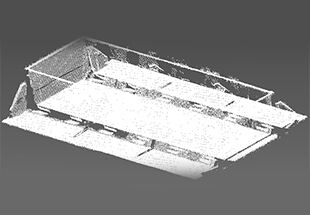
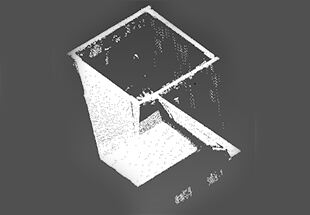
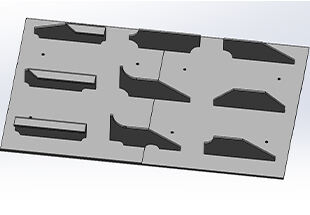
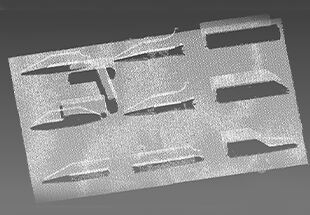
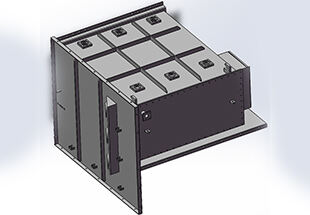
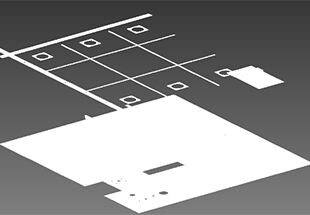
| Nie | Typ pracovného kusy | Obrázok modelu pracovného kusy | Bodová oblak obraz pracovného kusy |
| 1 | H nosič (Včetl. priame spáje) | 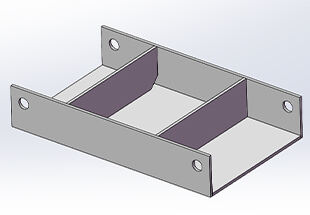 |
 |
| 2 | Doska jednotka |
 |
 |
| 3 | Železný korbél |
 |
 |
| 4 | Věžovitý |
 |
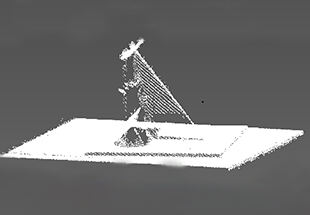 |
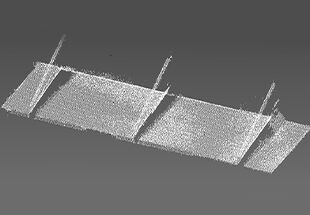
| 5 | Nosná deska pre purlinu |
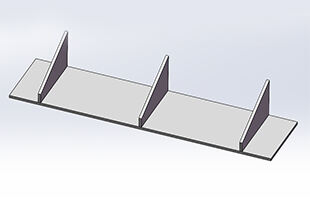 |
 |
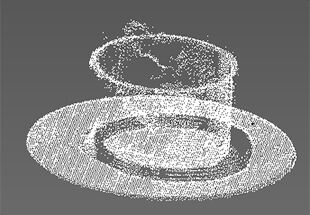
| 6 | Kruhová rúrna základňa |
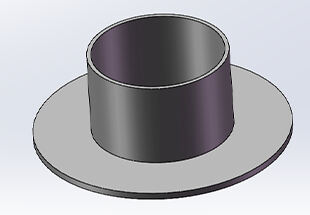 |
 |
| 7 | Križovatkovitá kruhová rúrna základňa |
 |
 |
| 8 | Cudzí povrch |
 |
 |
| 9 | Dvojitá vrstva dosky |
 |
 |
| 10 | Montážné žebro kanálkového profilu |
 |
 |
| 11 | Dvojitá svarovaná překrytová spojka | 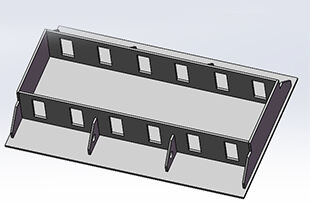 |
 |
| 12 | Boxová nosnica |
 |
 |
| 13 | Nerovné ohýbanie svarov |
 |
 |
| 14 | Transformátorová nádrž |
 |
 |





