Het betekent dat sensoren cruciaal zijn voor aI-robot . Ze zijn soort van de ogen en oren van robots. Zoals onze ogen ons laten zien en onze oren ons laten horen, laten sensoren robots zien en begrijpen wat er om hen heen gebeurt. Robots kunnen ook dingen over hun omgeving leren door middel van verschillende sensoren. Ze kunnen dingen zoals beweging, geluid, aanraking en zelfs hoe ver iets weg is, waarnemen. Sensoren zijn essentieel omdat ze robots in staat stellen veilig te navigeren, beslissingen te nemen en met hun omgeving te interacteren.
In de robotica vormen MINYUE sensoren een integraal onderdeel van de werking van robots, ze gebruiken deze voor de opgegeven taken. De sensoren voorzien robots van essentiële informatie die ze nodig hebben om hun taken nauwkeurig en efficiënt uit te voeren. Robots zouden vrijwel onmogelijk in staat zijn om objecten in hun weg te registreren, botsingen te vermijden en zelfs instructies van mensen te volgen zonder sensoren. Sensoren: Je kunt sensoren beschouwen als de hersenen van de robots, omdat ze een belangrijke rol spelen in hoe ze hun omgeving waarnemen en reageren.
Touchsensoren: Touchsensoren geven robots de mogelijkheid om objecten in hun omgeving te voelen en mee te interacteren. Wanneer een robot een object tegenkomt, leunt het op een touchsensor om te bepalen wat het heeft ontmoet, waardoor het adequaat kan reageren.
MINYUE Autonome robots zijn robots die tot op zekere hoogte onafhankelijk kunnen opereren zonder menselijke tussenkomst. De werking van deze robots berust op een groot aantal sensoren zoals laserlichtsensor die worden gebruikt om hun omgeving te observeren en taken autonoom uit te voeren. Laten we eerst doorgaan met enkele belangrijke onderdelen van autonome robots:
The kunstmatsige intelligentie robots vergroten hun mogelijkheden en voeren taken effectiever uit met behulp van verschillende sensoren. Als slechts één voorbeeld: lichtsensoren kunnen robots helpen om licht te vinden en het te volgen. Dit betekent dat als een licht wordt aangestoken, de robot erop af kan gaan. Geluidsensors: Robots kunnen reageren op spraakcommando's. De geluidsensor laat de robot weten wat de persoon zegt wanneer hij of zij spreekt.
Er zijn MINYUE touch sensoren en lasersensor die robots de mogelijkheid bieden om te interacteren met de objecten om hen heen. Bijvoorbeeld, als een robot een muur aanraakt, vertelt de touch sensor de robot om niet verder naar voren te bewegen. Verkeerslichten regelen het verkeer van voertuigen op de weg. Ze kunnen ook meten hoe ver een object verwijderd is, zodat de robot veilig kan bewegen zonder iets te raken.

Uit het bovenstaande kunnen we zien dat sensoren cruciale onderdelen zijn van robotechnologie. Ze laten robots voelen en aanraken in de omgeving. Inzicht in de verschillende soorten sensoren en de unieke rol die ze spelen in het grotere plaatje van robotechnologie zal ons helpen om te waarderen wat zulke kleine onderdelen bijdragen aan de toekomst van robotechnologie.
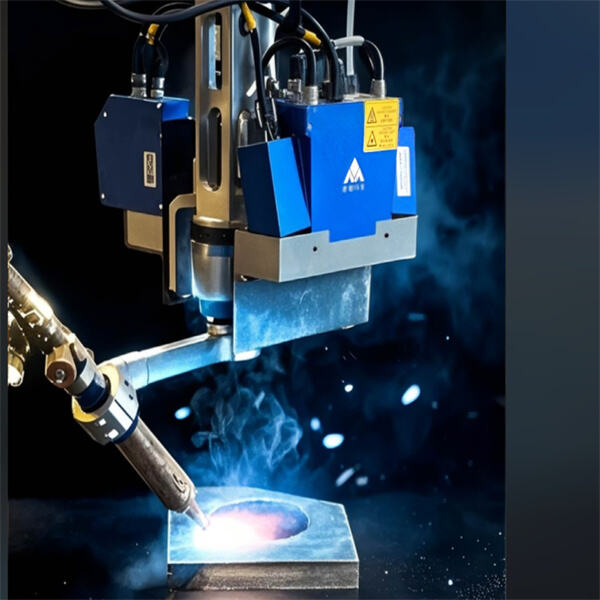
De functie van detecteren en traceren wordt toegepast, het lasnaad scannen, de positie en informatie van het lasnaad bevestigen, de positie van het lasnaad corrigeren tussen het 3D-digitale modellening en het werkpakket, en het probleem van scheef lassen door materialenfouten en thermische deformatie oplossen.
Snel, nauwkeurig, volledig zonder programmering, hoog rendement en hoge precisie. Het lost het ingewikkelde onderwijsproces van traditionele robots op en bespaart de stilstandstijd van het onderwijsproces.
Beijing Minyue Technology Co.,LTD, als wereldleider in hightech bedrijven voor niet-onderricht-intelligente toepassingen van industriële robots. We specialiseren ons in flexibele intelligente productie met onze zelfontwikkelde RobotSmart - Intelligent Beslissingsstelsel, SmartVision - Binoculaire Gestructureerd Lichtvisiesysteem, en SmartEye - Laser Visie Naadvolgsysteem. Lever een nieuwe generatie intelligente robotweld- en snijoplossingen.
Geef krachtige schuine laders, zijkantladers, omgekeerde laders, brugmontage, intelligente trajectplanning voor meerdere robots, meerdere externe assen en positioneerders voor samenwerkende taken. Realiseer robotbewegingssimulatie, botsdetectie, singulariteitsvermijding en aslimietdetectie.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








