 EN
EN
 AR
AR HR
HR NL
NL FR
FR DE
DE EL
EL HI
HI IT
IT JA
JA KO
KO PT
PT RO
RO RU
RU ES
ES TL
TL IW
IW ID
ID LV
LV LT
LT SR
SR SK
SK UK
UK VI
VI GL
GL HU
HU TH
TH TR
TR FA
FA AF
AF MS
MS MK
MK HY
HY AZ
AZ KA
KA UR
UR BN
BN LA
LA MN
MN KK
KK
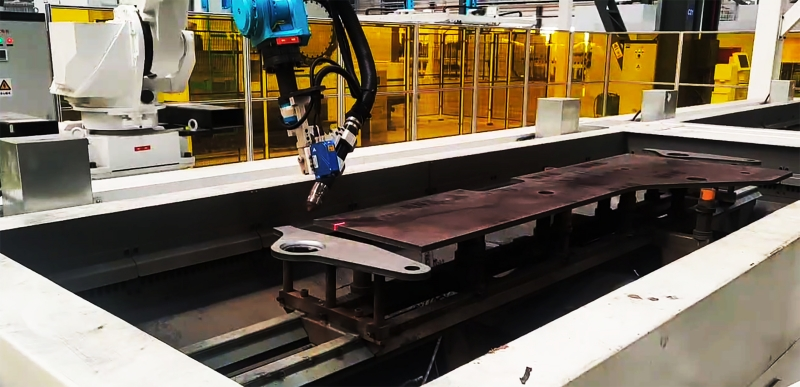
Дүниегің 10 метрлік ең үлкен гидравликалық қолтанушының бірінші сериясы тасымалдану аяғына жетті. 6.5 метрден, 7 метрден, 8 метрден 10 метрге дейінгі биіктік артуы сандардық жақсарту емес, базалық материалдар, өңдеу құралдары, техникалық процестер және пікірлердің кезеңдік жаңартуы, технологиялық жаңағашылықтың мәртебесін көрсетеді.
Гидравликалық қолтанушы қорғауындағы болым нүктелері:
1. Структуралық компоненттері – кутулған қорғау структуралары, қорғаулары қысқа, құрылғы силиктеріне қатысты қажеттіліктер үлкен, процестері құрылғы.
2. Көп түрлі өнімдер, кіші жиындар, сапарға шегін өзгертулер, программалауға ұсынылатын қолдау жобаларының көпшілігі, машиналардың пайдаланудың төмендігі.
3. Жұмыс материалдарының желектері, сипатталу қателері, материалдардағы қателер, жинау қателері, зейтін ыстамасы, барлығы жылу дәлдігіне тәсіл етеді.
4. Жұмыс материалдарының айрым түрлері мен өлшемдері көптеген роботтар, көптеген сыртқы осьтер, позиционерлер және координациялық жұмыс қажет етеді, траекториялардың қуатты қойылуы мен жылу жолдарының оңай емес.
Минюэ Технологиялары үлкендермен бірге қадам қадамды өтуге, төпке фокуста болуға және бір нүктеде жаңа ашықтарға жетуге бағытталған. Бастағанынан бері зерттеу және дамуға қарсы қосымша жіберіп, бірде-бір программалауға қажет ежейтін интеллектуалдық жылу шешімін шығарды.
Бірінші қадам: Пайдаланушы RobotSmart - Интеллектуалды Қарау жүйесіне үш өлшемді жұмыс моделін інәуінің мүмкіндігін қолданады.
Қадам 2: RobotSmart - Minyue Technology-ның ИИ жылындау және кесу деректер модельі мен көп дерекқорына негізделген Зерттеу жүйесі, алдыңғы, таңғы, төменгі, ганtrysлардық фрейм орнату, көп роботтар, көп шығыс осьтер және позиционерлер үшін күшті робот функцияларын береді интеллектуалды траекторияларды баптау және біріктік жұмыс істейді.
Көп роботтар, көп шығыс осьтер және позиционерлердің интеллектуалды баптау арқылы оптималды жылындау траекториясы автоматты түрде құрылады. Бұл стресс концентрациясын кемиді, деформация мен ішкі стрессі əн еңбек етеді және құрылғы компоненттердің жылындаудан кейінгі механикалық қатарын әсерлі түрде жоғарылатады.
Индустрли робот қозғалыс кодтарын автоматты түрде құрастыру арқылы робот қозғалыс симуляциясын, кірістерді тексеру, сингулярлықты қайта жолдау және ось шектерін тексеру мүмкіндігін жасайды, құрылғы компоненттердің 180-градусқа дейінгі азат тирімшік және көрме зонасы болмаған жылындауын жүзеге асырады.
Бірінші кезеңдегі зығыс қосу кезінде позиционерді басқарудың көмегімен, екінші кезеңдегі зығыс қосу атап қалады, оның істігін және порларды, тікелей қосымша элементтерді, толық қосылу жоқтығын және толық өту жоқтығын қосу процесінде қалайту үшін.
Қадам 3: SmartEye - Зығыс шовын қалыптастыру системасы, күшті зығыс процесінің кітапханасы бар, автоматты түрде әртүрлі бұрыштарда және әртүрлі қабат толқындарындағы әртүрлі шаршы процестері үшін зығыс шовы салынушының орнын және зығыс қысқарту бұрыштарын баптаеді, оның плоскость және тік беттегі көп қабат және көп өту зығысын қолдайды.
Зығыс шовын сканингдеу, шов орнын және мәліметтерді растау, үш өлшемді деталь модельін және нақты жобалау объектінің шов орнын дұрыстау, материалдық қателер мен термік деформациядан берілген сәйкессіздік мeseлесін шешу.
Сабақ қабілеті 30%-тан астам өзгертілді, жұмысшы қызметкерлердің қызметінің әсері 100%-тан астам артты, сабақ циклі 28 күннен 9 күнге кемісті.