
სველის მეთოდი
ქვემოთ დაბრუნებული არკის სველი არის მეთოდი, სადაც არკი წინააღმდეგობს ფლუქსის სარე. ქვემოთ დაბრუნებული არკის სველის მეთოდი, მაღალი სველის ხარისხი, მაღალი პროდუქტიულობა, და შეიძლება გაკეთდეს გარეშე არკის სინათლესა და ძალიან ცოტა სიმყარო, ეს საკმარისი მონაწილეობა, რომელიც განსაზღვრავს ქვემოთ დაბრუნებული არკის სველის გამოყენებას წნევის მოწყობილობებში, ტუბის მწვევაში, კარის ბირთვებში და სველებში, და სხვა მნიშვნელოვან სტალინის სტრუქტურების წარმოებაში.
ბოლო წლებში გამოვიდნენ ეფექტური და ხარისხიანი სველის მეთოდები, მაგრამ ჯერ არ შეძლებენ ცვილის ქვემოთ მყარი სველის პოზიციას მის გამოყენების სფეროში გაუკეთებენ. გემობის, ენერგიის გენერირების მოწყობილობების, ბოილერების და წნევის ვესტების, დიდი მაღალიების, როლინგის მოწყობილობების, დიდი მანქანების, ხიდების და ავლის და ქიმიური მოწყობილობების წარმოებაში, ცვილის ქვემოთ მყარი სველი გახდა მთავარი სველის პროცესი, რომელიც განათავსებს სველის სტრუქტურების წარმოების განვითარებას.
სველის მახასიათებლები
ცვილის ქვემოთ მყარი სველი რთულია ყველა პოზიციაზე
ძალიან შეზღუდულია გამოსადეგებელი სველის მასალები, დიდი მოთხოვნებია წინადადეგის მომზადებისას
არ შეიძლება პირდაპირ დახვეწილი იყოს სიმაღლის პოზიცია მოკლე კუთხის მიმართულების მიმართ, საჭიროა შეკვეთის სისტემა სველის ზუსტობის გარანტირებისთვის.
მისი ყველა ტექნიკური მახასიათებელი საჭიროა მั่ნამდენი და მართვის სისტემის მხარდაჭერა.
სისტემას საჭიროა მაღალი მიმდინარე მდგომარეობა, მაღალი სტაბილობა და გარანტირება სველის ზუსტობისთვის.
პროექტის მოთხობები
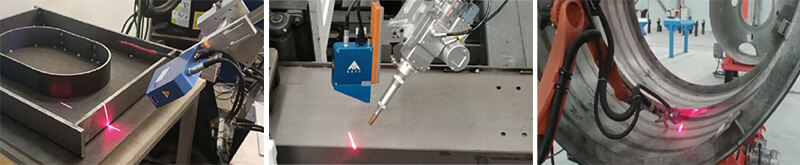
სუბმერგენტული სველის მოთხობებისათვის, MinYue Technology წარმოადგენს WRP-220-ს MY302 მრავალღერძოვან მოძრაობის კონტროლერით სრულყოფილი ამოხსნის სახით. ამ ამოხსნის სეტი სტაბილობაზე, ნადежდაზე და გრძელად განავლებაზე დაფუძნებულია, რაც ეფექტუალურად უზრუნველყოფს მანქანის და გადაჭრილი სანაგის მშრალებს შორის მანძილის და განმავლობის მუდმივ მუდმივობას, რათა გარანტირებული იყოს სველის და გადაჭრილი სანაგის მშრალების მორგების გარეშე გარდაქმნა, მშრალების კარგი განწყობა, სველის წევრის ავტომატური ჩამორთვა, უწყვეტ და გრძელად მუშაობის ავტომატური სველი და სხვა ეფექტები.
გამოყენებით სენსორი + მოძრაობის კონტროლერის სრულ გამართვაში, შეიცვალეთ PLC-ის პროგრამირების მუშაობის მოწინააღმდეგობა. ჩასვით და გამოიყენეთ სტანდარტული სპეციალური მაशინების ქვემოთ, ხელმისაწვდომი ხაზის, გერბის ფერადი, დანაშაული სატრაქტო და სხვა რეჟიმები. ეს გამართვა უზრუნველყოფს საჭირო ავტომატიზაციას, რათა შეინახოს მანქანარების რაოდენობა, გაუმჯობეს მუშაობის ხარისხი, ასევე ტექნიკური დონეზე შეიცვალოს მუშაობის ინტენსივობა და მანქანარების ტექნიკური მონაცემების მოთხოვნები, რათა დაუზუსტოს მუშაობის სტაბილობა და დამარცხებადობა ან მინიმალური მანქანარების გამოყენება.
ფუნქციონალური მერიტები
WRP-220 ერთად მითითებული MY302 მრავალღერძოვანი მოძრაობის კონტროლერით არამატერიალური გამოყენების შემთხვევაში მხოლოდ ჯვარის გადაწყვეტის განახლებას უზრუნველყოფს, არამედ მრავალ ტიპის სველის მეთოდებს, რომლებიც 娷ებს წრფივ სველის, გარშემო სველის, TIG, მრავალფართო სველის და ა.შ., რათა შესაბამისად მოვა სველის პროცესის მრავალფეროვან საჭიროებს. მას აქვს ძალიან ძალიან დაბრუნებული ელექტრომაგნიტური და არკის სინათლე ინტერფერენცია, დიდი მუშაობის მანძილი, მცირე ზომები და ერთად არის მაღალი დაცვის დონე, რათა შესაბამისად მოვა მაღალი სიზუსტეს სველისთვის, რომელიც გამოიყენება სველის პოზიციის მოძებნისა და რეალური დროში გამოსაყენებლად.
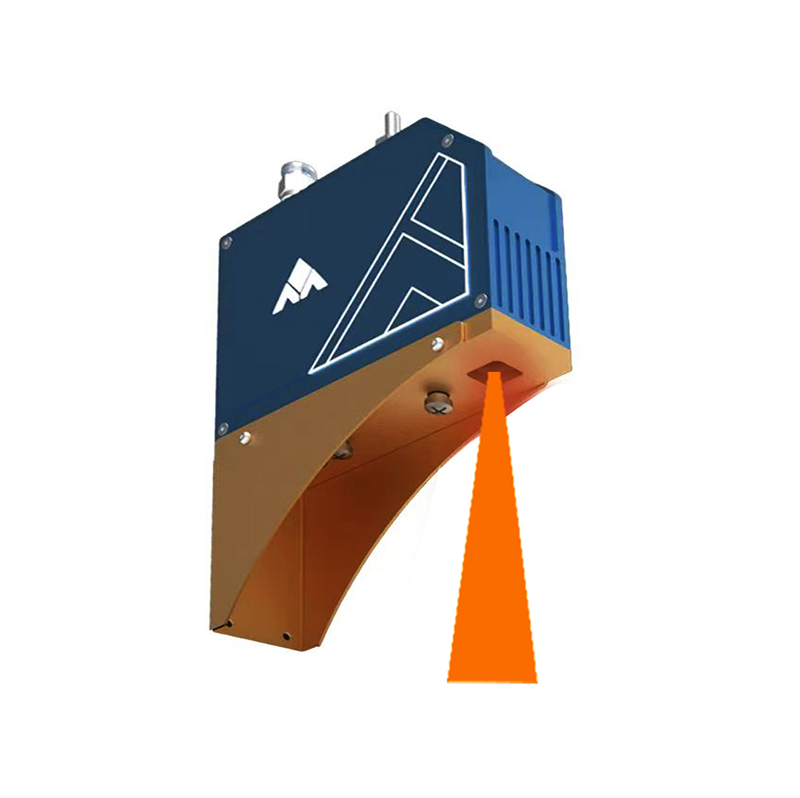
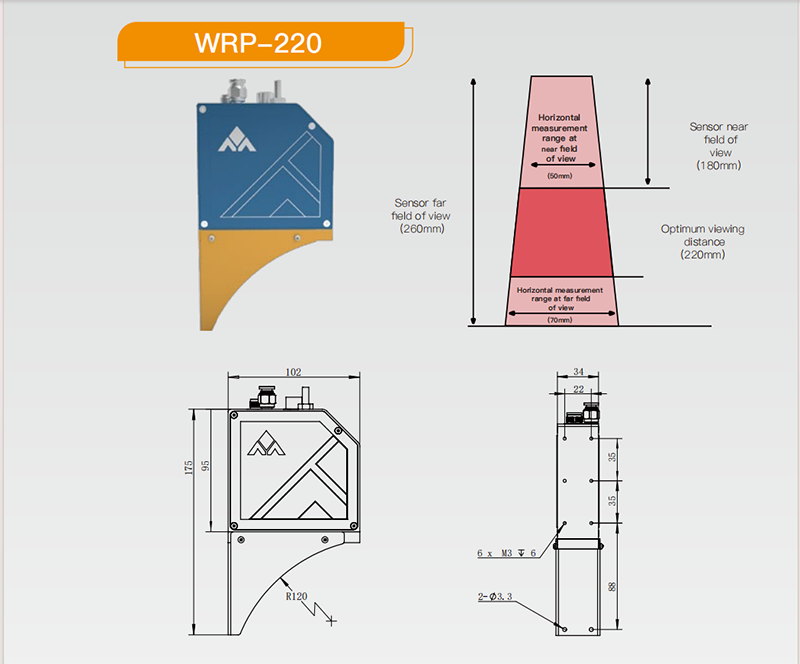
WRP-220 ლაზრის გამოყენებით შეკუმშვის სენსორი
ლაზრული შეკვეთის სენსორი იყენებს ლაზერს, რომელიც ირადიაციას გამოვლის სველის ზედაპირზე, რათა შექმნას ლაზრული სვეტი, რომელიც აღიწერება და იმაჯინება მაღალგარდა კამერას მეშვეობით. ალგორითმული обработкой სველის სამგანზომილებიანი მახასიათებლები გარდაქმნილია სტრუქტურულად მოწოდებულ ინფორმაციაში, რომელიც შეიცავს სველის კოორდინატებს, გადახრებებს, შუალედებს და ა. ეს ინფორმაცია გადაი전ება რობოტის კონტროლერს, რომელიც რობოტს მოძებნის საჭირო ტრაექტორიებს და პროცესურ პარამეტრებს სველისთვის, რომელიც განსაზღვრავს რობოტს სველის ან მუშაობის გადახრების ჩასწორებისთვის ნამდვილად დროში, რათა შეასრულოს სრულყოფილი სველის მუშაობა. სხვა ამოხსნების შედარებით, ლაზრული შეკვეთის სასარგებლობა მilikiს უკontაქტური, მაღალი ზუსტების, სწრაფი სიჩქარის და კარგი ადაპტაციის მონაცემები.
სენსორი გამოიყენება ლინეარული სტრუქტურული სვეტის ზომვისთვის, რომელიც ასხვავს სწრაფ ხაზოვან სურათის ჩაღებას, გარემოდან შემუშავებას და მექანიკური მოძრაობის გარეშე; მძლავრი ადაპტაბილიტე, საშუალება გაქვს ვარჯიშის პარამეტრების გამოსახმავად; სრულად ჩანაცვლებულია, გარე ინდუსტრიული კონტროლის კომპიუტერებით და ბევრი სხვა მერიტობით, რომელიც გამოიყენება განსხვავებული ტიპის ავტომატურ ვარჯიშში. ნებისმიერი ვარჯიშის პროცესის შემთხვევაში, ჩვენ შეგვიძლია გავაწონოთ მั่ნამდებელი მხარდაჭერა და სტაბილური მუშაობა, რომლებიც უზრუნველყოფს მარტივ შედეგებს განსხვავებულ ვარჯიშის სცენარებში.
სენსორი შესაბამისია ყველაზე მოთხოვნადობის გამოყენებებისთვის, რადგან არ არის სამყაროს, წყალის და ნელის (IP67) სენსიტიური და არ არის ელექტრომაგნიტური რადიაციის (EMC) წყაროების წინააღმდეგი.
ძალიან მძლავრი ფუნქციები.
01. პოზიციისა და გადახრის حيحვევა
პოზიციისა და გადახრის حيحვევის ფუნქცია გამოიყენება განსხვავებული ნაწილების მარტივ ვარჯიშის სცენარებში, რომლებიც ერთმანეთს ერთი მოდელია, მაგრამ მათ არის განსხვავებული ტოლერანციები. ეს ფუნქცია უზრუნველყოფს, რომ ნაწილების გადართვას არ სჭირდეს ხელით შესატანი ინტერვენცია, და რობოტი განსაკუთრებით განსაზღვრული პოზიციისა და გადახრის სისტემის მიერ მიზეზდება, რათა მიიღოს ზუსტი ვარჯიში.
Два-точечная პოზიციონირება შესაბამისია გამრავლების 2D გადახრისთვის.
მრავალწერტილოვანი პოზიციონირება, რომელიც შესაბამისია მრავალსეგმენტური 2d გადახვევის კავშირებისთვის
სეგმენტური პოზიციონირება, რომელიც შესაბამისია მრავალსეგმენტური 3d გადახვევის კავშირებისთვის.
02. რეალური დროში ტრაკინგი
რეალური დროში ტრაკინგის ფუნქცია გამოიყენება კავშირის სცენარებში, სადაც საჭიროა მაღალი ეფექტი და გარემოში არ არის ინტერფერენცია. სენსორი დაფიქსირებულია კავშირის ჩარბის მიმართულებით, და კავშირის ჩარბი ავტომატურად რეგულირებს კავშირის გზას 3D კოორდინატური მონაცემების მიხედვით.
03. სკანირება და ავტომატური კავშირი
სკანირებისა და ავტომატური კავშირის ფუნქცია აძლევს სენსორს საშუალებას ჯერ აგრეთ აგრეთ კავშირების გეომეტრიული ინფორმაციის შეკრება. ეს ფუნქცია შესაბამისია მაღალი რეფლექტირების, მოკლე კავშირის სავარაუდო სავლეთებისა და სარგებლო კავშირის სცენარებისთვის.
ლაზრის კავშირის ტრაკინგი
ლაზრის კავშირის ტრაკინგი შეძლებს კავშირის გადახვევების განმარტებას მაღალი, დაბალი და მარცხენა მარჯვენა მიმართულებებში.
შეძლებს კავშირის განმარტებას პატარა შუანების მქონე კავშირებისთვის.
ამოახსნის კავშირის ტრაკინგის პრობლემას ნაწილაკების მცირე ლარებისთვის.
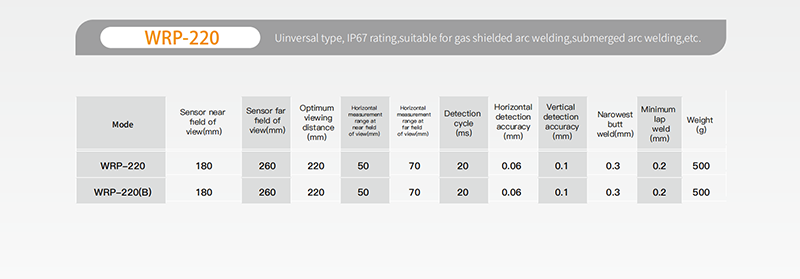
ოპტიმალური დაკვირვების მანძილი არის 약 220 მმ.
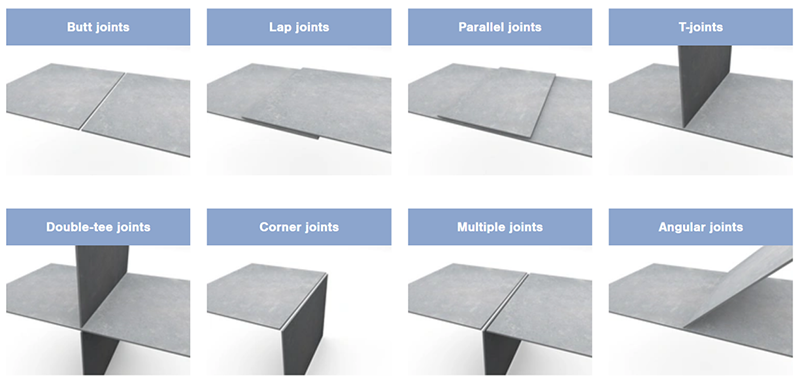
ქსოვილის ტიპის მხარდაჭერა
V-გრძელი ქსოვილი
კუთხეული ქსოვილი
ქსოვილი ჩამორთვით
კავშირის ქსოვილი
ღრუბლის ქსოვილები და Atlanta
უნივერსალური მოდელი, IP67 დაცულობის დონე, შესაბამისი არის აერის დაფარული ქსოვილისთვის, წყლის ქვაბის ქსოვილის და ა.შ. სამუშაო სცენარისთვის.


 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK
