 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Პლაზმის გერბერის ჭრილობის ამოხსნა გემობის ინდუსტრიისთვის
Რობოტულ ქუჩის ჭრილის ინდუსტრიაში, საწვავის რობოტები მიმართული არის მსგავს გამოწვევებს. Minyue ტექნოლოგიის "Non-Teach" ამოხსნა ეფექტურად დახმარებს მომხმარებლებს ინდუსტრიის პრობლემების აღმოსავლელში და უკვე გამოვიყენება მიმდევრობით გამოწვეულ კომპანიაში სასამართლო მехანიკაში. ფლექსიბილური წარმოების ტენდენციით, მარტივი გამოყენებისა და ავტომატიზაციის დონის უნდა აისარებოდეს რობოტებისთვის. Minyue ტექნოლოგიის ინტელექტუალური საწვავის რობოტული პლატფორმა მიმართულია პროდუქტების კონცეფციაზე „გამოიყენება და მარტივად გამოიყენება“, რაც შესაძლებლობას აძლევს ქუჩის ჭრილის ინდუსტრიაში და დახმარებას მომხმარებლებს წარმოების განახლებაში.

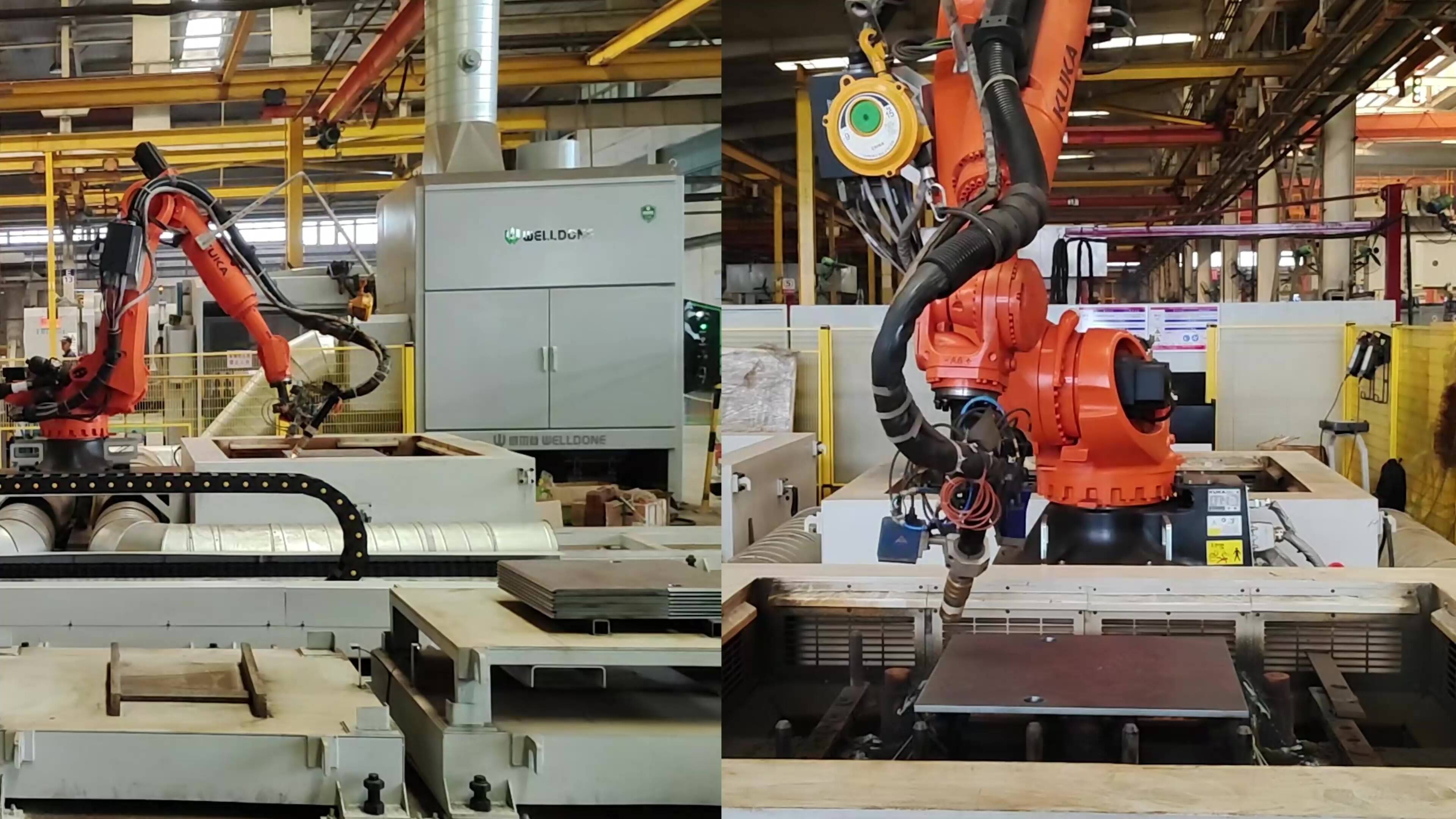
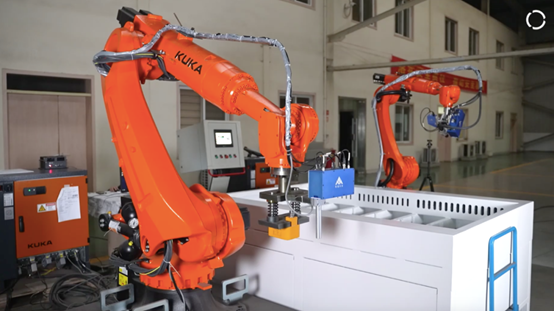
Non-Teach რობოტული ქუჩის ჭრილის სტანცია
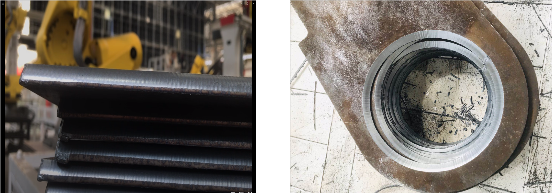
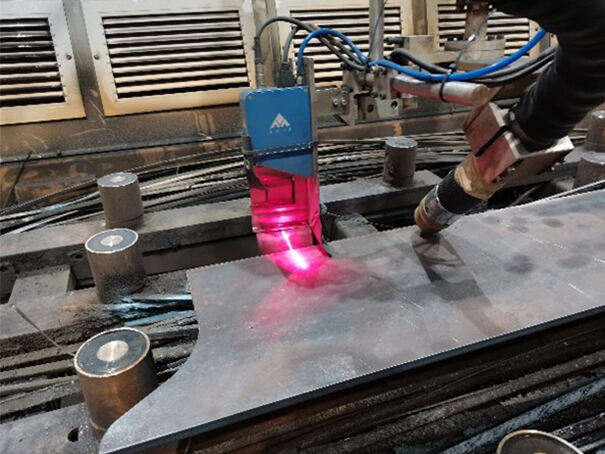
Რეალური ჭრილის ეფექტი
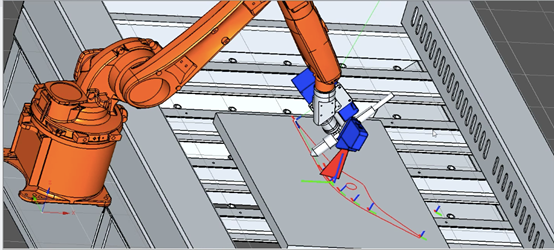
Minyue ტექნოლოგია უსწრაფი ინტელექტუალური ხაზის ჭრის ამოხსნა, რომელიც არეალიზებს ერთ ღილაკიან მარტივ მűveნებას. Ხაზის ჭრის განხორციელება გამოყენებული პროგრამირების გარეშე და ვიზუალური გამოგონების სენსორების გამოყენებით რომელიც არის ეkvივალენტური რობოტიკის ინდუსტრიაში უადამიანობას! Ამ ამოხსნას აქვს სამი საგნივი მერიტი:
Პირველი მomentი: ადამიანების გამოთვლა რთული პროგრამირებისგან. წარმოებამდე, გამოყენებული გამოყენების გარეშე პროგრამირების პროგრამული უზრუნველყოფა და CAD გრაფიკების მიხედვით, ის ავტომატურად გეგრძნობს ტრაექტორიის გეგმას და გენერირებს ჭრის ტრაექტორიას. წარმოების პროცესში გამოიყენება დიდი ვიზუალური ბინოკულარული კამერა მართლური პოზიციონირებისთვის, და ლაზერი გამოიყენება ჭრის ტრაექტორიის ზუსტი корректировкиსთვის. ამ ამოხსნას შეუძლია ფუნდამენტურად ამოიხსნას მუშაობის გარდაქმნისა და არაერთნობრივობის პრობლემა.
Მეორე წერტილი: ის ინტეგრირებულია მკვლევარ დაჭერის პროცესის ბიბლიოთეკასთან, რომელშიც ჩათვლის ფლამის დაჭერა და პლაზმის დაჭერა და ა. დაჭერის ზღვის, პლატის thicness, მასალა, გროვის კუთხე, მორკი, ის ავტომატურად განსაზღვრავს ჰაერის მოძრაობას, ვოლტი და ტექურების პარამეტრებს დაჭერის პროცესში ხელით შეყვანის გარეშე.
Მესამე წერტილი: ის გთავაზობს სრულყოფილ ამოხსნას, რომელიც შესაძლებელია განსაკუთრებული მოთხოვნების გათვალისწინებით გროვის დაჭერის შემთხვევაში, ჩათვლის ერთი რობოტის დაჭერის სტანციას პატარა და საშუალო ზომის ნაწილებისთვის, ორ რობოტის სტანციას მომავალი, გამოტანის, დაჭერის სტანციას და გროვის დაჭერის სტანციას დიდ ნაწილებისთვის.






