EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Პროგრამის გარეშე ინტელექტუალური გერბერის ჭრილობის რობოტული სტანცია
Გადაჭრილი ჭრილი Პრობლემები, ეფექტიულობის პრობლემები ხდება პროდუქცია ჩანაწერი
Კუთხის ჭრილა, წინა პროცესის შეკრულება. გემების ქვეყნურ და სტალინის სტრუქტურების, სტალის სტრუქტურების, სასურველი მანქანების და სხვა ინდუსტრიების სფეროში, გემების ქვეყნურ და სტალის სტრუქტურების გარდა, სიმძლავრეების წინა პროცესში, საჭიროა მასალის ჩაჭრილი კუთხეების განსაზღვრა და ჯგუფების შექმნა, შემდეგ კი განხორციელდება ცხელი გამოწვევის ერთ-ერთი ან რამდენიმე გამოწვევის გამოყენება. ეფექტიულობის პრობლემები ხდება პროდუქციის შეზღუდვის წერტილი. ამიტომ გემების ქვეყნური, სტალის სტრუქტურებისა და სასურველი მანქანების ინდუსტრიები დიდ მოთხოვნას გამოიწვევენ რობოტული კუთხის ჭრილის მიმართ. Კუთხის ჭრილი ნაწილების რაოდენობა ათასები ან მე-ათასები შეიძლება იყოს, ხოლო ინდივიდუალური ვარიეტეტები ათეულები ან ათობის მიმართულებით განვითარებულია. მრავალფეროვანი, მცირე მოცულობისა და ლექსიკური პროდუქციის საჭიროების გაზრდა ყველა მეტი გახდება გავრცელებული.
Სტალის სტრუქტურების, გემების ქვეყნური, სამშენებლო მანქანებისა და სასურველი მანქანების ინდუსტრიებში მწვერვარი პროცესების ეფექტიულობის გაუმჯობესება საჭიროა.
Ტრადიციული ჭრილის მეთოდები მრავალი ზღვარი ჰქონდა
Ტრადიციულად, ბაზრში გამოყენებული კუთხის ჭრის მეთოდი ჩამოვა ჯაჭვის მაशინის ჯაჭვაზე, ფლამის ტროლის ხაზის გამოსახატვლად ჭრის მეთოდზე, ხუთ-ღერძიანი სპეციალური ჭრის მაशინის ჭრის მეთოდზე და რობოტის კუთხის ჭრის მეთოდზე.
Წინა კუთხის ჭრის მეთოდების შედარებით, ინდუსტრიული რობოტის კუთხის ჭრა ფაბრიკატორები არის აღქმული როგორც ერთ-ერთი ყველაზე ზუსტი ჭრის მეთოდი.
Მრავალფეროვანი და მცირე ბატონის მუშაობის შემთხვევაში, ტრადიციული სწავლების გზა ძალიან შეზღუდულია, არ არის ზუსტი გამოსახატველი მუშაობის ზუსტება, ჭრის პროცესის პარამეტრები სირთულიანია და ა.შ.
Რезультатად, რობოტიკის კომპანიები, სისტემის ინტეგრატორები და ბოლოს მომხმარებლები მძიმე და მარტივი „არ n-სწავლების ” ამოხსნა სჭირდება.
Minyue ინტელექტუალური კუთხის ჭრის ამოხსნა შედგება RobotSmart Ინტელექტუალური გადაწყვეტილების სისტემის , SmartVisions 3D სტრუქტურული სინათლე ვიზუალური სისტემის და SmartEye-ის ლაზერული ვიზუალური სისტემა გამოყენებით რეალიზებს არაპედაგოგიურ ინტელექტუალურ კუთხური ჭრის. სრულყოფილად ამოწმებს პროგრამირების რთულებსა და დაბალ ინტელექტუალურ დონის პროდუქციის პრობლემებს, შესაბამისად მისაღებად არის ჭრის მოთხოვნები პატარა ბატჩებისა და განსხვავებული ტიპის ნაწილების პროდუქციისთვის. აéliს გადამუშავების ეფექტიურობა და შედეგი. მეტ სარგებლო და განსხვავებული დავალებები.
მხოლოდ სამი ნაბიჯი: 1. რისუნგის იმპორტი; 2. სწრაფი ტრაექტორიის გეგმა; 3. ავტომატური პროგრამის გენერირება, ხარისხით და რაოდენობით შეძლებთ დასრულებას თქვენი ჭრის დავალებები.
Გამოყენება MinYue Technology Ინტელექტუალური კუთხური ჭრის სტანცია, სადაც მხოლოდ CAD-ის DXF ფაილის იმპორტი საჭიროა, ჭრის პარამეტრების განსაკუთრებული დამატება, პროცესური პარამეტრების ერთ ღილაკით მორგება, განსაკუთრებული ტრაექტორიის ავტომატური გაუმჯობესება, კუთხური ტრაექტორიის ინტელექტუალური გეგმა, და ჭრის ზედა და ქვედა კუთხე განსაკუთრებულად გარეშე შებრუნებით. ბინოკულარული კამერა მუშაობის პოზიციის განსაზღვრა, წყვეტის სახლავის ახორციელება და ჩასვლა. CNC წყვეტის სახლავზე მუშაობს, წყვეტის შემდეგ ახორციელებს. მრავალფეროვანი მუშაობები ერთდროულად არიან ადაპტირებული, წყვეტის ტრაექტორიის ავტომატური გეგმა, წყვეტის დიაპაზონი 0.5-4 მეტრი. ძალიან გამარტივებს მუშაობის ეფექტიურობას და საẨმანოს.
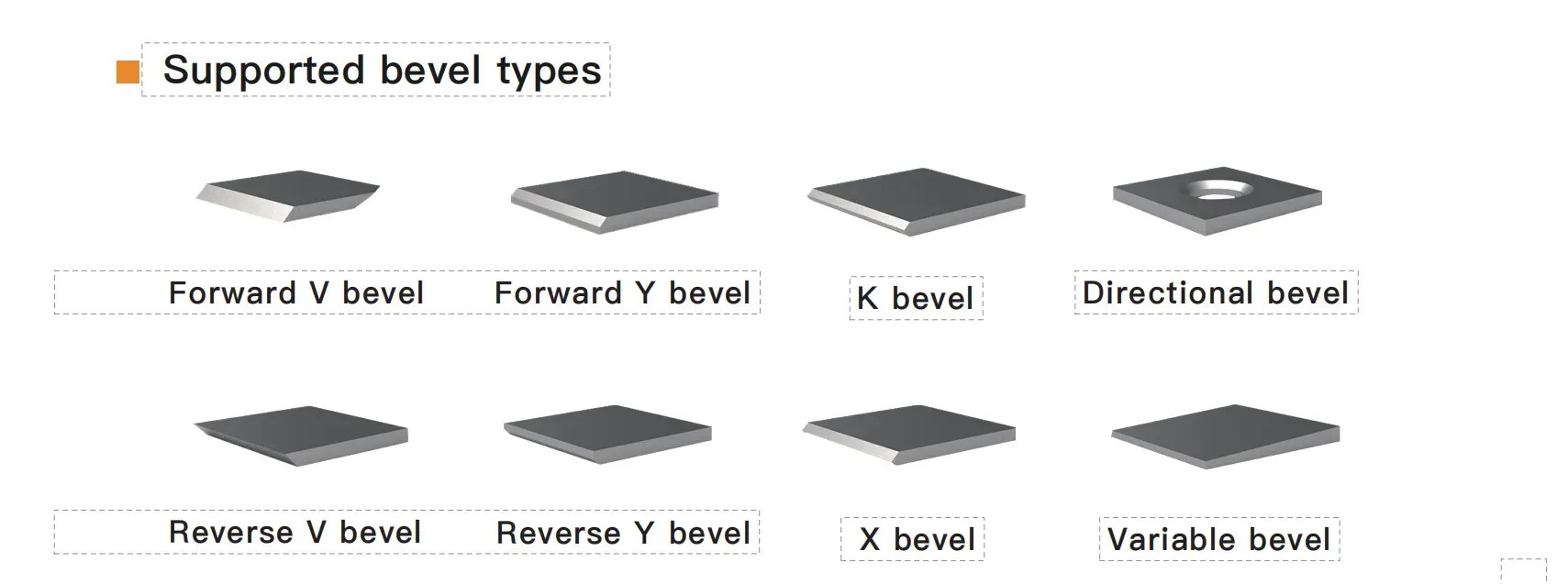
Უჭერს ფლემის წყვეტის პროცესს და პლაზმის წყვეტის პროცესს.
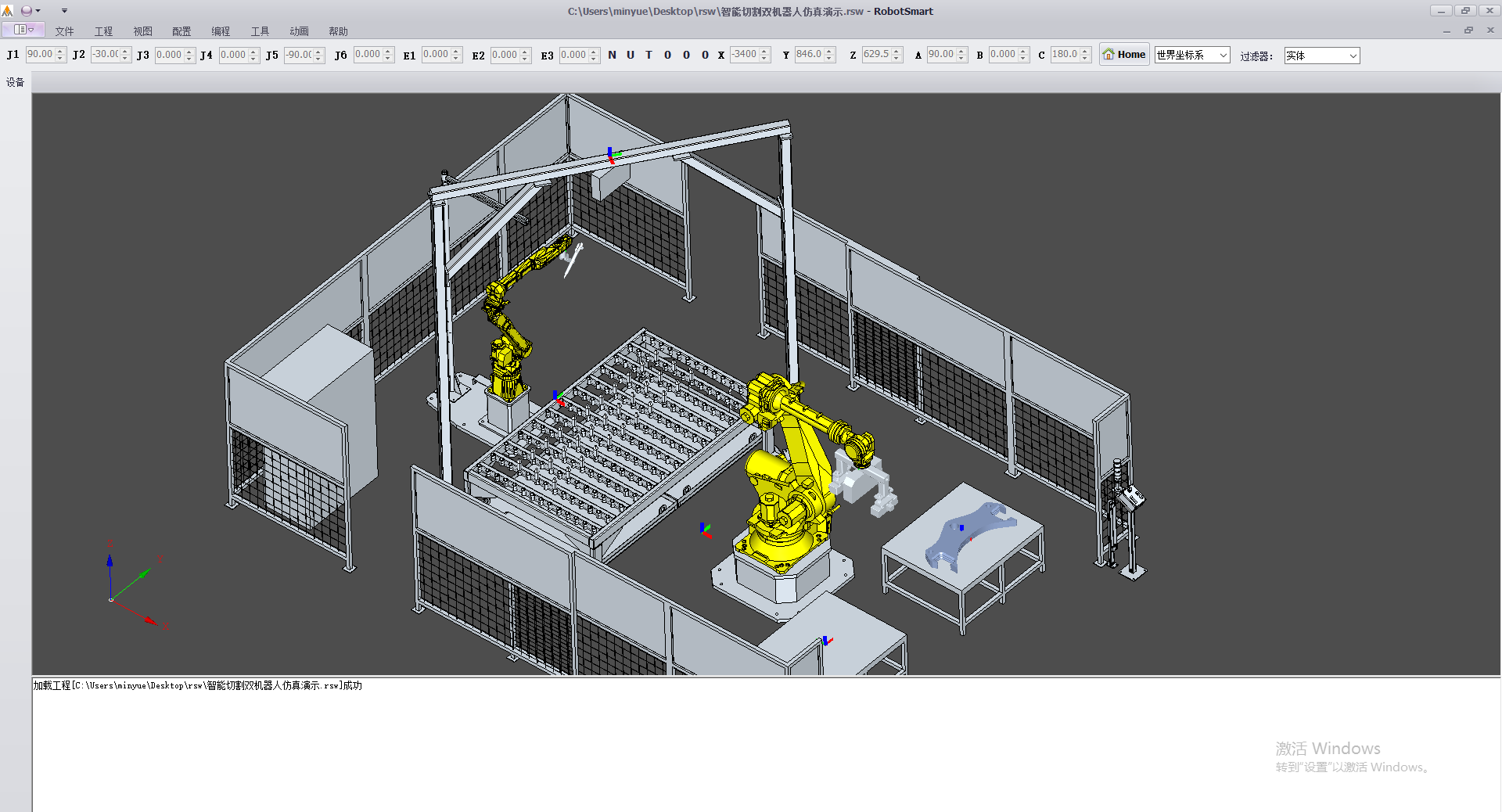
1 Გამოყენების სფერო
Th e წყვ ის რობოტის სისტემა იყენებს ორსადგუროვან რეჟიმს, რომელიც შედგება M20ID/25 ბურთეული რობოტისგან, ინტელექტუალური არა-სწავლის სისტემისგან, ერთღერივი რობოტის მიწის რეილი YLV25-ისგან, ფლემის წყვეტის სისტემისგან და ფლემის წყვეტის სამუშაო მაგიდა , ჯამში 7 ღერ Gaussian.
Ადაპტიური მუშაობის ზომის დიაპაზონი: 3200*2500mm ;
Წყვეტის პროცესი: ფლემა
Უჭერს მრავალფეროვან ჩატვირთვის და გატვირთვის რეჟიმებს, ხელით ჩატვირთვა და გატვირთვა, ბალანსირებული კრანის ჩატვირთვა და გატვირთვა, მოგზაური კრანის ჩატვირთვა და გატვირთვა, ორ რობოტის კოოპერაციული ჩატვირთვა და გატვირთვა, CNC ჩატვირთვა და გატვირთვა.
2 წარმოების პროცესი
Ხელით დაასავარაუდებეთ მუშაობის ნაწილი ჭრილად გადაწყვეტილი პოზიციაზე (მუშაობის განმეორება ±5 მმ-ში).
Პირველი პროდუქცია საშუალებას აძლევს პროგრამულ უზრუნველყოფას, რომელიც არჩევს ჭრილად გადაწყვეტილ პოზიციას, ავტომატურად გენერირებს ჭრილად გადაწყვეტილ ტრაექტორიას და პროცესურ პარამეტრებს, გენერირებული პროგრამა შეიძლება შეინახოს მ კონტროლის სისტემაში, შემდგომი პროდუქცია შეიძლება გამოიძახოს პირდაპირ, (ინტელექტუალური გადაწყვეტილების სისტემით RobotSmart შეიძლება გადაადგილოს 15-20 წუთში).
Ჭრილად გადაწყვეტილი რობოტი ზუსტად პოზიციონირებს მუშაობის ნაწილს ლაზრის საშუალებით ვიზიონი სენსორი
(ეფექტიურობასა და ზუსტობაში პრეიმუსი კონტაქტულ რänderების მოძებნელებზე).
Რობოტი დაწყება ჭრის მუშაობის ნაწილს.
Რობოტი გადადის სხვა სამუშაო მაგიდა ჭრილად გადაწყვეტილი მűveრებისთვის.