EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


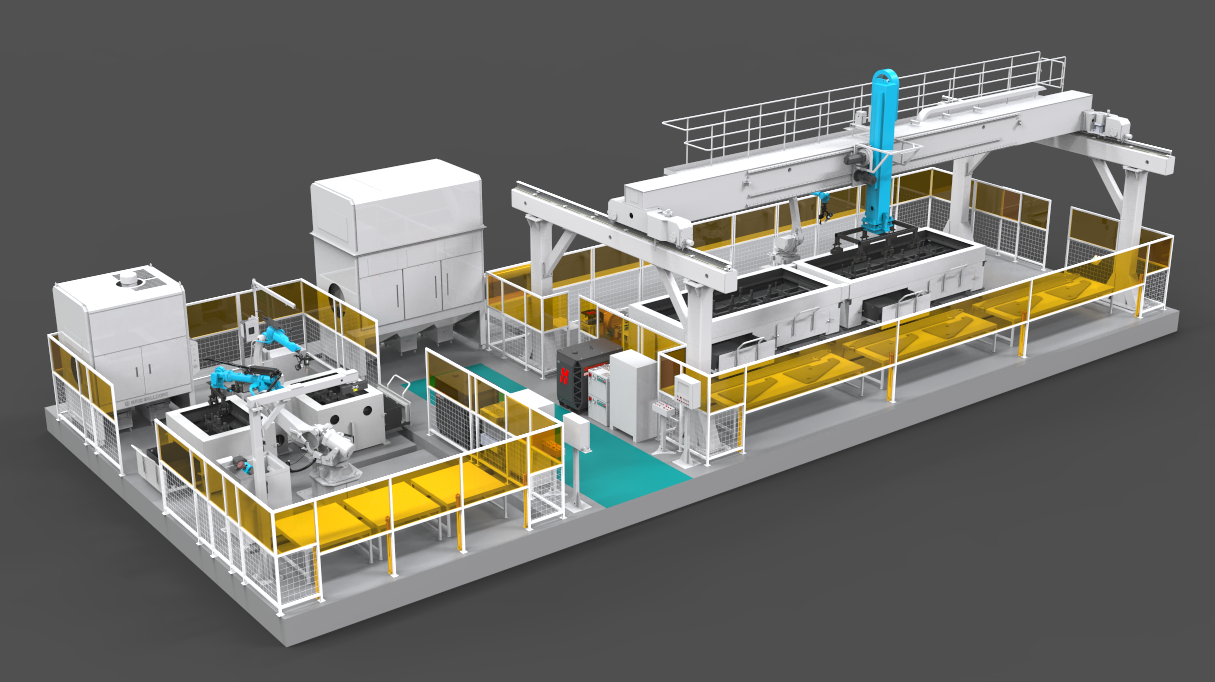
ინტელექტუალური რობოტული ფლემის და პლაზმის გერბერის ჭრილობის სტანცია
სამუშაო დიაპაზონი:
დადებითი გრძელი: 100x100-1000x1000mm@20-45°
შებრუნებული ჩრდილო: 100x100-800x800mm@40-60°
არა-ინსტრუქციური ინტელექტუალური ჩრდილოს ჭრის
წინა პროცესში კლინის დაჭრვა და შერთვა, ხარისხისა და ეფექტიურობის პრობლემები შეიძლება გამოწვევით გამოწვიოს პროდუქციის ზომებს, რაც განსაკუთრებით ჭეშმარიტია მცირე ნაწილების კლინის დაჭრის შემთხვევაში. მცირე ნაწილების კლინის დაჭრისას ამჟამად ჩვეულებრივ გამოიყენება تقليსიური ფლამური დაჭრვა, რომელიც მოითხოვს წინასწარ განსაზღვრულ წერტილებში დაჭრა, მდებარეობის დამატება და კლინის ფლამური ტროლის მიერ დაჭრა, ასევე მოითხოვს მცირე მუშაობის საერთო სამუშაო ადგილს, და თითოეულ მუშაობის გადართვისას საჭიროა წინასწარ ახალი გათბობა. ამიტომ, تقليსიური ფლამური დაჭრვის პროცესში არის კლინის დაჭრის მარტივი ერთობლივობის, ხარისხის დაბალი, ეფექტიურობის დაბალი, მეტი მუშაობის მოთხოვნა და დაბალი გამოყენების დიაპაზონი და სხვა ნებისმიერი ნებისმიერი ნებისმიერი ნებისმიერი ნებისმიერი.
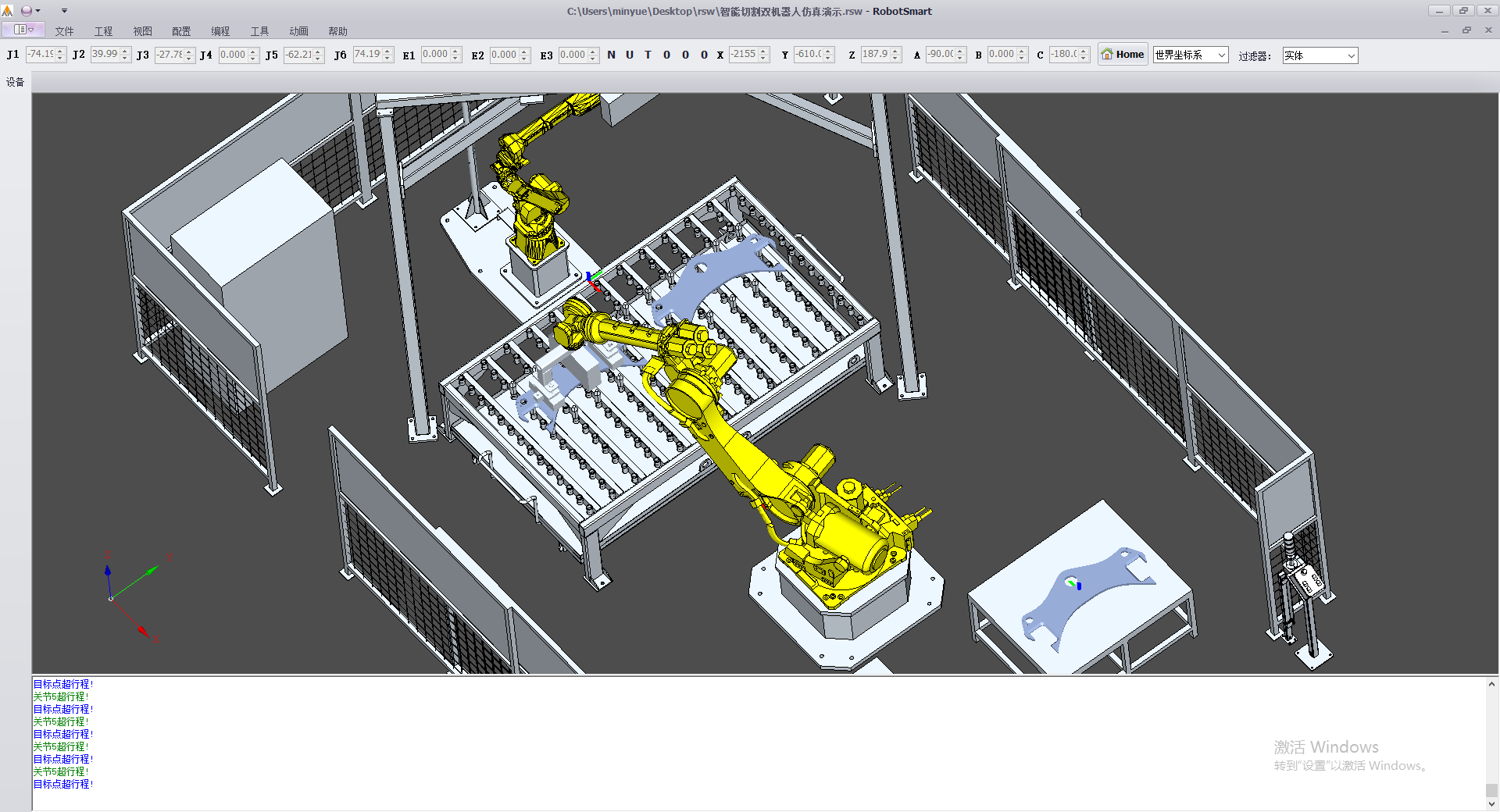
MINYUE TECHNOLOGY-ის ნონ-ტექსტური ინტელექტუალური კუთხის ჭრივა RobotSmart ინტელექტუალურ გადაწყვეტილების სისტემას იყენებს, SmartVisions 3D ვიზუალურ სისტემასა და SmartEye ლაზრის საშუალებით, რომელიც ხელს უწყობს „ნონ-პროგრამულ + ვიზუალური“ ინტელექტუალური კუთხის ჭრივას. ამოიღებს პროგრამირების რთულებსა და დაბალ ინტელექტუალური დონის პროდუქციის პრობლემებს, ერთდროულად კი აკმაყოფილებს მცირე მოცულობის განსხვავებული ტიპის ნაწილების ჭრივის მოთხოვნებს, გამართლებს გამოსარჩევად ეფექტი და გადასა!!,
მას შემდეგ კი კომპლექსური და განსხვავებული დავალებების შემთხვევაშიც მხოლოდ სამი ნაბიჯია საჭირო.
1. CAD DXF ფაილების იმპორტი; 2. სწრაფი ტრაექტორიის გეგმა; 3. ავტომატური ჭრივის პროგრამების გენერირება, შემდეგ კი ჭრივის დავალება შესრულდება სწრაფად.
ავტომატური ჭრივის ტრაექტორიის გარკვეული გაუმჯობესება, ინტელექტუალური კუთხის ტრაექტორიების გეგმა, ზედა და ქვედა კუთხეების უკან ჭრივის გარეშე.
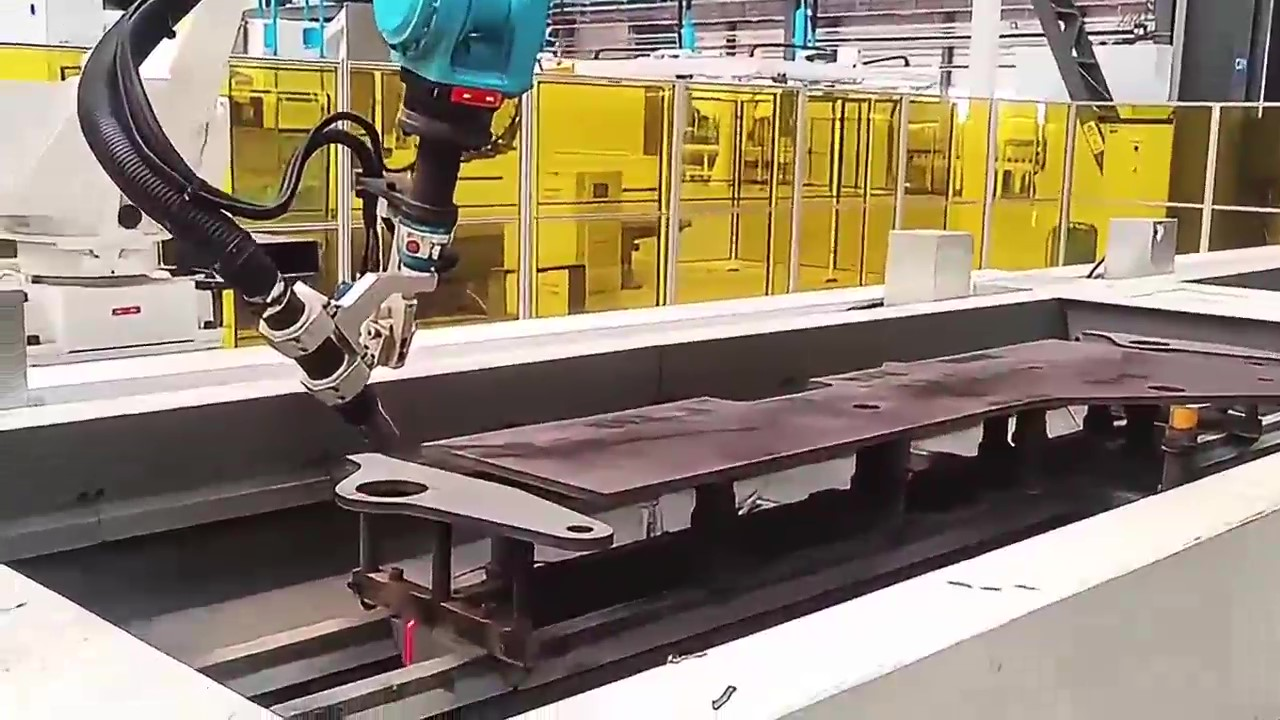
ბინოკულარული კამერა გადაწყვეტს სურათებს, რათა იცognize ნამუშევრის პოზიცია და აღებისა და ჩასასვლად გაჭრის მაგიდაზე. გაჭრის შემდეგ CNC გადადის ნამუშევრის გაჭრის მაგიდაზე აღებისთვის. რამდენიმე ნამუშევრი ადაპტირებულია ერთდროულად, და გაჭრის ტრაექტორია განიხილება ავტომატურად, გაჭრის დიაპაზონი 0.5-4 მეტრია. ძალიან გააუმჯობეს სამუშაო ეფექტივობას და სარეზის უსაფრთხოებას. იხილავს ფლემის გაჭრის პროცესს და პლაზმის გაჭრის პროცესს.
იხილავს რამდენიმე ტიპის ჩატვირთვასა და გატვირთვას, ხელით ჩატვირთვასა და გატვირთვას, კანტილევერული კრანის ჩატვირთვასა და გატვირთვას, ტრაველინგის კრანის ჩატვირთვასა და გატვირთვას, ორ რობოტის კოოპერაციულ ჩატვირთვასა და გატვირთვას, CNC ჩატვირთვასა და გატვირთვას.
წარმოების პროცესი
● ნამუშევრის უზრუნველყოფა ხელით გაჭრის მაგიდაზე (ნამუშევრის პოზიციის განმეორება შეიცავს ±5mm).
● პირველ წარმოება სოფტუერის გარანტია, რომელიც ავტომატურად გენერირებს ჭრის ტრაექტორიას და პროცესურ პარამეტრებს, პროგრამა შეიძლება იქნებით შენახული კონტროლ სისტემაში, შემდგომ წარმოებაში შეიძლება გამოიძახოთ პირდაპირ. (RobotSmart-ის დეპლოიმენტი შესაძლებელია 15-20 წუთში ინტელექტუალური დეციზიური პლატფორმის სისტემის მეშვეობით.)
● ჭრის რობოტი იყენებს ლაზერულ ვიზუალურ სენსორს მუშაობის მონაკვეთის ზუსტ განსაზღვრად. (მერიტი: უმეტესი ეფექტიურობა და ზუსტობა კონტაქტულ კраიფინდერებზე).
● მხარდაჭერს Ground Rail Gantry Cantilever Robot Workstations.
● გამოშვებულია 12 ამოხსნა განყოფილ აპლიკაციის სცენარებისთვის.
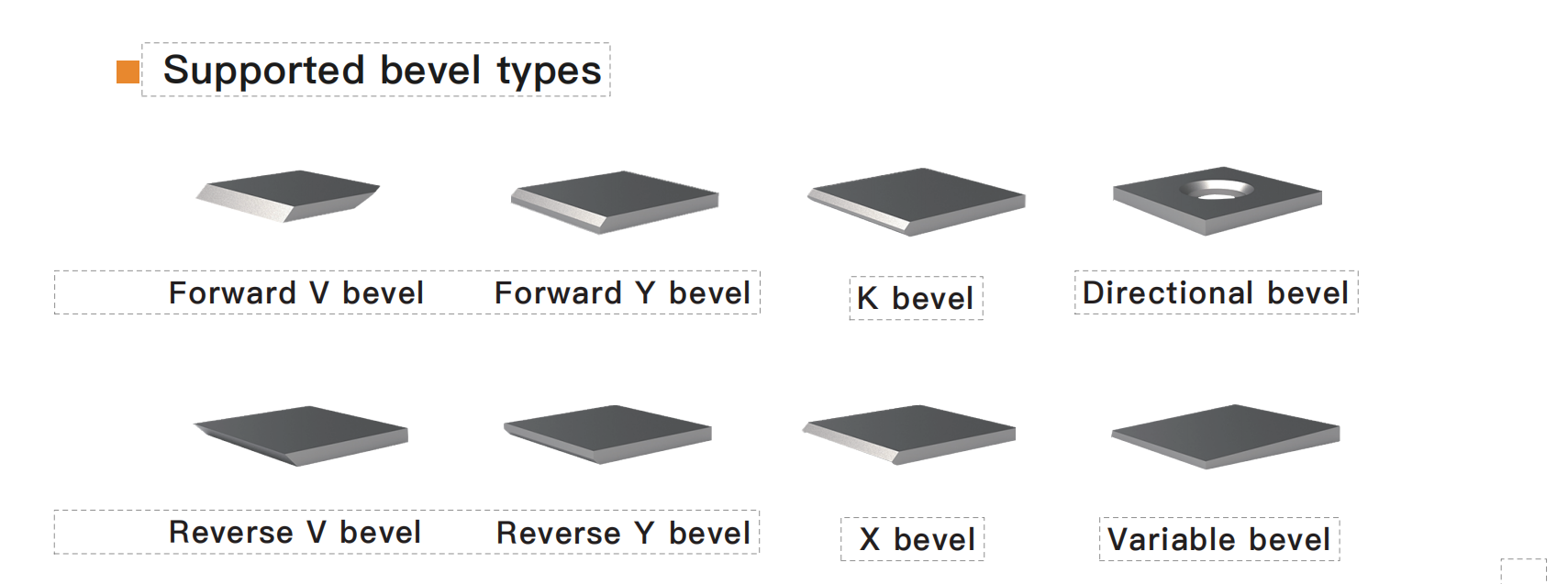
მხარდაჭერილი ჩრიდის ტიპები