EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


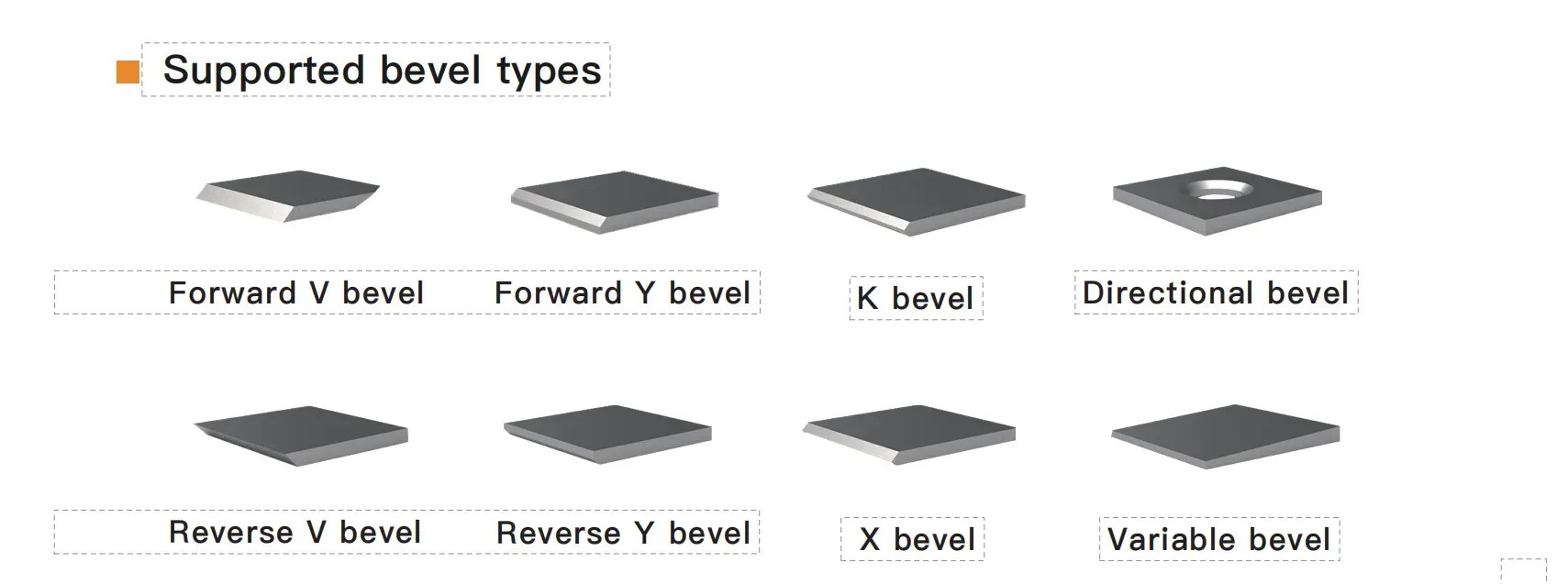
Stasiun Robot Pemotongan Bevel Tanpa Program Cerdas
Pemotongan Bevel Masalah Sakit, Masalah Efisiensi Menjadi Produksi titik lemah
Pemotongan bevel, penyambungan proses sebelumnya. Sebelum menyambung papan tebal dalam industri pembuatan kapal, struktur baja, mesin batubara, dan lainnya, perlu untuk membentuk sudut pada bahan yang akan disambungkan dan kemudian melakukan penyambungan fusi panas tunggal atau multi-lapisan multi-pass. Masalah efisiensi menjadi titik lemah produksi. Oleh karena itu, industri pembuatan kapal, struktur baja, dan mesin batubara telah mengeluarkan permintaan besar untuk pemotongan bevel robotik. Jumlah jenis pekerjaan pemotongan bevel dihitung dalam ribuan atau puluhan ribu, dan jumlah individu dihitung dalam batch puluhan atau ratusan. Seiring dengan meningkatnya kebutuhan untuk produksi fleksibel, berbagai macam produk, dan dalam jumlah kecil.
Ada kebutuhan mendesak untuk meningkatkan efisiensi perubahan produksi dalam industri seperti struktur baja, pembuatan kapal, mesin konstruksi, dan mesin batubara.
Metode pemotongan tradisional memiliki banyak keterbatasan
Pemotongan miring tradisional di pasar umumnya menggunakan penggilingan mesin gerinda, pemotongan garis dengan kereta api api, pemotongan mesin khusus lima sumbu, dan pemotongan miring dengan robot.
Dibandingkan dengan metode pemotongan miring sebelumnya, pemotongan miring dengan robot industri diakui oleh para pembuat sebagai salah satu metode pemotongan paling akurat.
Menghadapi benda kerja dengan berbagai jenis dan jumlah kecil, cara pengajaran tradisional memiliki keterbatasan besar, kurangnya presisi pada pengolahan tepi tumpul, parameter proses pemotongan yang kompleks, dan sebagainya.
Sebagai hasilnya, perusahaan robotika, integrator sistem, dan pengguna akhir sangat membutuhkan solusi yang sederhana dan mudah digunakan “tidak n-pengajaran ”.
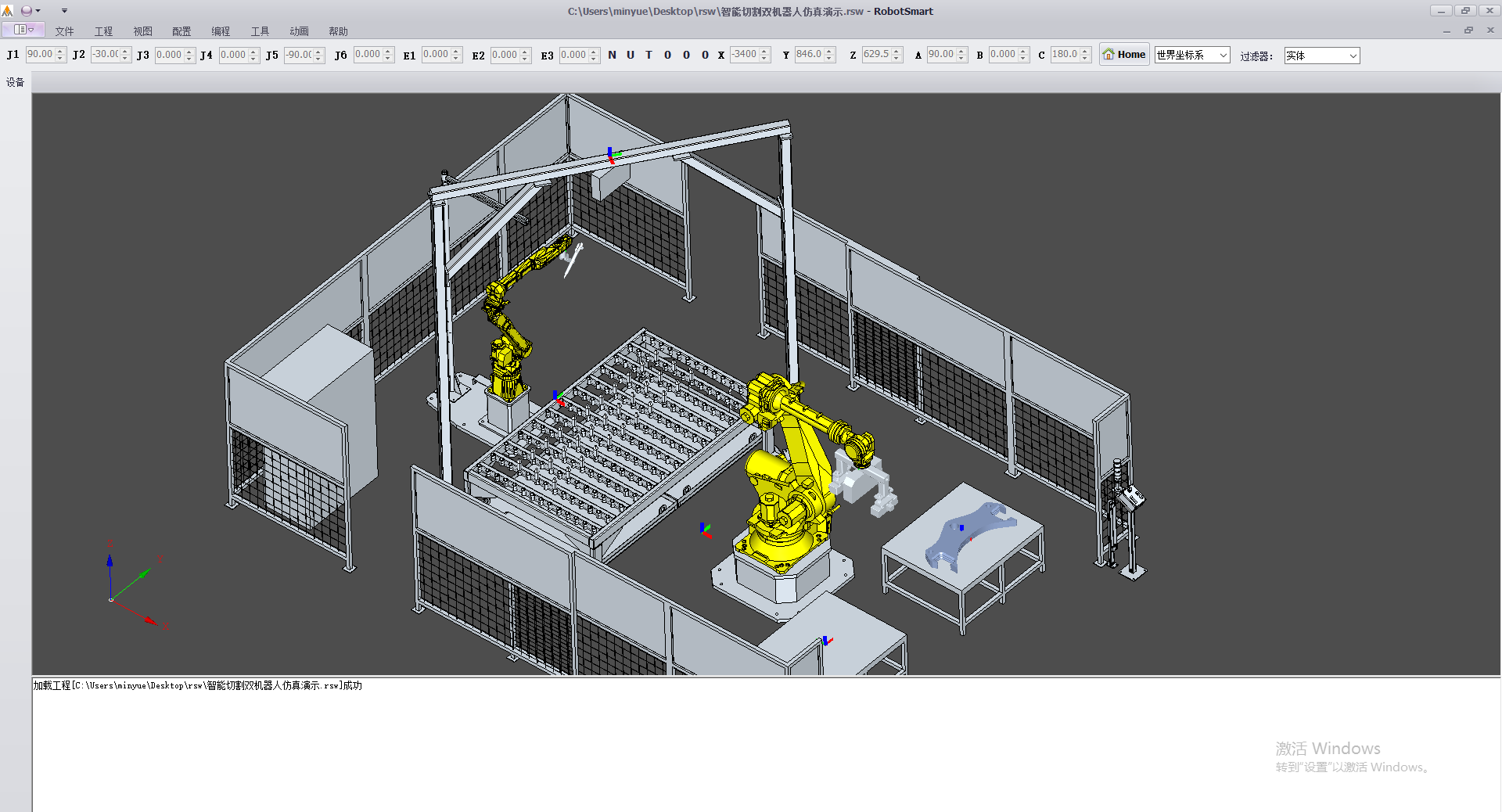
Solusi Pemotongan Miring Cerdas Minyue terdiri dari RobotSmart Sistem Keputusan Cerdas , Sistem Visi 3D Cahaya Struktur SmartVisions dan SmartEye sistem pelacakan visi laser mewujudkan pemotongan bevel pintar tanpa pengajaran. Menyelesaikan secara menyeluruh titik sulit dalam produksi terkait pemrograman yang rumit dan tingkat kecerdasan yang rendah, serta memenuhi persyaratan produksi untuk memotong pekerjaan dalam jumlah kecil dan berbagai jenis. Meningkatkan efisiensi pemrosesan dan hasil. Menghadapi tugas yang lebih kompleks dan bervariasi.
hanya tiga langkah: 1. mengimpor gambar; 2. perencanaan trajektori cepat; 3. pembuatan program otomatis, Anda dapat menyelesaikan tugas pemotongan Anda dengan kualitas dan kuantitas.
Penggunaan MinYue Technology Stasiun pemotongan bevel pintar, Anda hanya perlu mengimpor file DXF dari CAD, menyesuaikan parameter pemotongan, mencocokkan parameter proses dengan satu tombol, mengoptimalkan jalur secara otomatis, perencanaan cerdas jalur bevel, dan memotong bevel atas dan bawah tanpa membalik sisi. Binocular kamera untuk mengenali posisi benda kerja, mengambil dan menempatkan meja pemotongan. CNC bekerja pada meja pemotongan untuk mengambil setelah pemotongan selesai. Berbagai benda kerja dapat diadaptasi secara bersamaan, perencanaan otomatis lintasan pemotongan, jangkauan pemotongan 0,5-4 meter. Meningkatkan secara signifikan efisiensi kerja dan keselamatan.
Mendukung proses pemotongan api dan proses pemotongan plasma.
1 Lingkup aplikasi
Th e cutt sistem robot mengadopsi mode operasi dua stasiun, yang terdiri dari robot tipe M20ID/25 terbalik, sistem las cerdas tanpa pengajaran, rel lantai robot sumbu tunggal YLV25, sistem pemotongan api dan pemotongan api mEJA KERJA , dengan jumlah total 7 sumbu.
Rentang ukuran benda kerja yang sesuai: 3200*2500mm ;
Proses pemotongan: Api
Mendukung berbagai mode muat dan lepas, muat dan lepas manual, muat dan lepas derek keseimbangan, muat dan lepas derek jalan, muat dan lepas kolaboratif dua robot, muat dan lepas CNC.
2 proses Produksi
Tempatkan secara manual benda kerja di atas meja pemotongan untuk posisi awal kasar (dalam batas ±5mm dari keakuratan ulang benda kerja).
Produksi pertama melalui perangkat lunak untuk memilih posisi pemotongan yang secara otomatis menghasilkan lintasan pemotongan dan parameter proses, program yang dihasilkan dapat disimpan ed di dalam sistem kontrol, produksi berikutnya dapat dipanggil langsung, (melalui sistem pengambilan keputusan cerdas RobotSmart dapat diterapkan dalam waktu 15-20 menit).
Robot pemotong menentukan posisi benda kerja dengan menggunakan laser visi sensor
(keunggulan dibandingkan pencari tepi kontak dalam hal efisiensi dan presisi).
Robot awal memotong benda kerja.
Robot pindah ke yang lain mEJA KERJA untuk operasi pemotongan.