 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Stasiun Robot Welding Cerdas Jenis Rel Lantai untuk Struktur Baja

Robot welding jenis rel tanah dilengkapi dengan sistem welding non-teknis cerdas Friendess dan pelacak jarak visual besar untuk sambungan. Bisa langsung mengimpor file model 3D dari Tekla, SolidWorks atau UG, langsung mencocokkan parameter proses welding, secara otomatis mengidentifikasi posisi las yang tepat, dan menghasilkan proses las terbaik yang dioptimalkan untuk pelaksanaan las.
Sumbu berjalan jenis rel tanah meningkatkan fleksibilitas arah panjang. Robot dapat terhubung ke rel tanah untuk melas sambungan lebih panjang sekaligus, dan stasiun kerja dapat beroperasi di kedua sisi rel. Terutama digunakan untuk las plat balok H, pelat dasar kolom, pelat penopang atap, konsol, dan struktur lainnya.
| Robot | 1 set robot Fanuc |
| Sumber daya las opsional | Mesin las Aotai dan aksesori-aksesorinya atau mesin las Megmeet dan aksesori-aksesorinya |
| Sistem las | Perangkat lunak pemrograman offline tanpa pengajaran MINYUE, sistem pelacakan visi laser MINYUE. |
| Aplikasi skenario | Cocok untuk pelat gusset, bagian corbel, bagian struktural kecil, dll. Saat ini dapat digunakan pada balok utama berbentuk H dan balok sekunder dalam struktur baja, unit pelat kecil dan sedang pada jembatan kapal, kolom baja berbentuk H peralatan, balok platform peralatan, dan struktur lainnya. |
| Sistem pembersihan senjata | Sistem pembersihan senjata SC220A |
| Panjang rel tanah | 6 meter (opsional sesuai pengguna) |
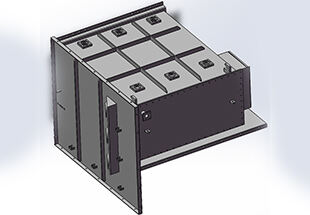
Sistem Pembersihan Senjata
Stasiun pembersihan senjata SC220A adalah perangkat untuk membersihkan pistol welding robot. Digunakan untuk membersihkan sisa las pistol secara otomatis selama proses las robot, memotong kawat secara otomatis, serta melindungi nozzle pistol las dan ujung kontak, yang memperpanjang umur pakai pistol las dan menghemat biaya. Mengurangi biaya konsumsi, menjaga kualitas las yang baik, dan meningkatkan efisiensi las. Operasi sederhana dan mudah digunakan.
Keuntungan dari stasiun pembersihan senjata: 1. Waktu pembersihan senjata singkat dan ketersediaan sistem tinggi. 2. Secara otomatis menyelesaikan proses pembersihan senjata tanpa operasi manual. 3. Mencegah masalah kualitas yang disebabkan oleh kontaminasi selama pengelasan. 4. Dilengkapi dengan jarum kalibrasi TCP robot.
Perangkat lunak pengelasan robot
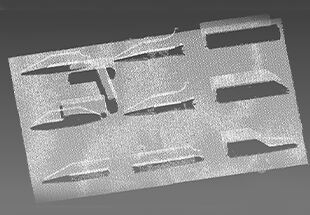
Perangkat lunak dapat secara otomatis mengekstrak sambungan las dari gambar tanpa penanda las, mengurangi beban kerja partisipasi manual. Dengan mesin 3D berkinerja tinggi dan pengontrol robot, titik-titik yang dibuat secara otomatis disimulasikan dan diverifikasi untuk mencegah tabrakan dalam pekerjaan sebenarnya.
Dan tanpa jenis gambar, pemodelan terbalik pemindaian 3D, pembuatan cepat gambar 3D, pembuatan lintasan las robot secara otomatis, optimasi lintasan las, visualisasi sikap, deteksi otomatis tabrakan torch las.
LDWP-305 pelacak laser
LDWP-305 adalah sensor cerdas pemindaian garis untuk sambungan las. Ini memperoleh informasi kontur dari bagian sambungan las melalui pemindaian laser garis, dan membimbing robot atau mesin las untuk secara otomatis menyelesaikan proses las. Fungsi pengambilan gambar, pemrosesan, dan identifikasi sambungan las dilakukan di dalam sensor tanpa memerlukan komputer eksternal. Sensor ini memiliki tingkat integrasi yang tinggi dan mengurangi biaya perangkat keras keseluruhan sistem. Tahan terhadap cahaya busur dan percikan las, secara cerdas mengenali sambungan las, dan mudah dioperasikan. Memiliki struktur yang rapi, ukuran kompak, aksesibilitas tinggi, serta berbagai tipe. Bisa dipilih dan digunakan sesuai dengan skenario aplikasi, dan parameter yang paling sesuai dapat disesuaikan.

Keuntungan
1. Mendukung non-pengajaran untuk berbagai produk seperti panel sandwich, balok truss, bracket, partisi jembatan, dan stand panel;
2.Tidak perlu menandai las pada tahap desain, dan posisi las target dapat diekstraksi secara otomatis dengan mengimpor gambar 3D;
3.Tidak diperlukan intervensi manusia, robot secara otomatis menyelesaikan tindakan seperti pengembalian nol, transisi, pencarian posisi, las, penghitungan, dan pembersihan pistol;
4.Tidak diperlukan operasi di lokasi, program dapat dibuat kapan saja dan di mana saja, dan dikirim secara jarak jauh ke robot untuk produksi sesuai dengan waktu yang ditentukan;
5.Pemrograman offline mandiri, simulasi 1:1 gerakan robot, menghindari gangguan robot sebelumnya dan menghindari tabrakan;
6.Teknologi kembar digital dapat menampilkan trajektori robot di lokasi, tegangan las, arus, kecepatan, dan informasi produksi lainnya secara real time.
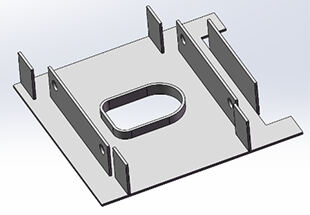
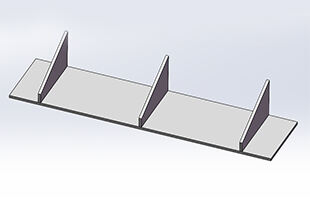
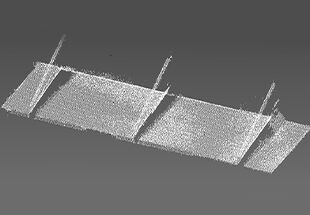
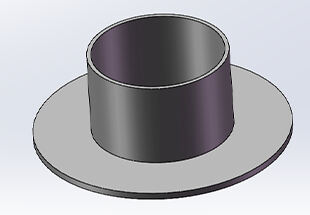
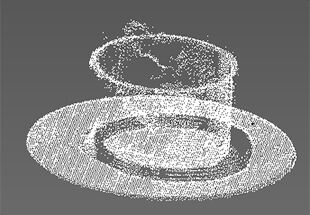
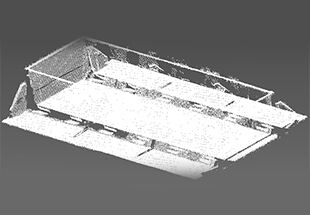
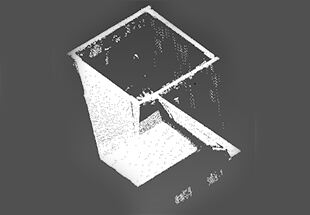
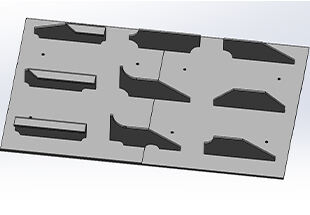
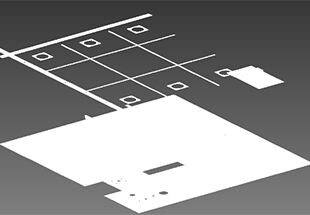
| Tidak | Jenis benda kerja | Gambar model benda kerja | Gambar awan titik benda kerja |
| 1 | H Beam (Termasuk las butt) | 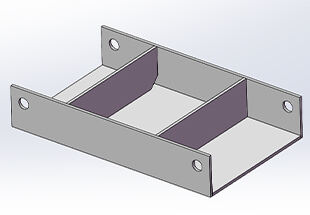 |
 |
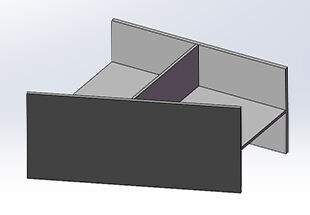
| 2 | Unit papan |
 |
 |
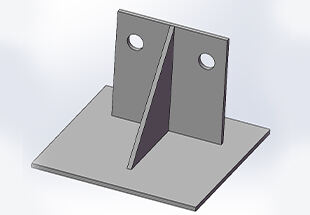
| 3 | Korbel Baja |
 |
 |
| 4 | Menara |
 |
 |
| 5 | Pelat pendukung purlin |
 |
 |
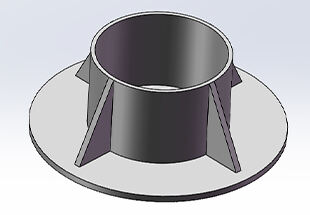
| 6 | Basis tabung bulat |
 |
 |
| 7 | Basis tabung bulat berbentuk salib |
 |
 |
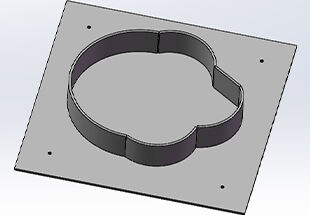
| 8 | Permukaan asing |
 |
 |
| 9 | Papan lapis ganda |
 |
 |
| 10 | Perakitan balok saluran |
 |
 |
| 11 | Sambungan tumpang sisi dua kali las | 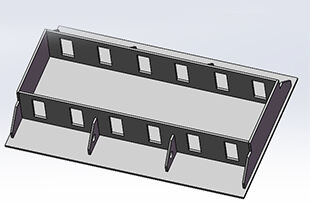 |
 |
| 12 | Girder kotak |
 |
 |
| 13 | Pengelasan bengkok tidak beraturan |
 |
 |
| 14 | Tangki Transformator |
 |
 |





