
Հալման մեթոդ
Անդրեստով համարումը դա համարման մեթոդ է, որտեղ լարը աշխատում է ֆլյուսի շերտի տակ: Անդրեստով համարման մեթոդը՝ կայուն համարման որակ, բարձր ծախսավճարություն, և կարող է անցնել առանց լարի լուսավորության, և շատ քիչ дыմի, այս նշանական առավելությունները համարում են, որ անդրեստով համարումը հանդիսանում է սեփական օգտագործումից անգամ սեղանների, տուների պատրաստումից, տուփաձև հարթանիշների և սյուների, և այլ կարևոր արտադրանքների պատրաստման ժամանակ:
Վերջին տարիներում համարվող և բարձր որակով հանդիպող հանգույցավորման մեթոդներ են, բայց դա դեռ չի կարող ազդել գեղարվեստական արկային հանգույցի դերի վրա իր կիրառման ոլորտում։ Սպիտակավարությունում, էլեկտրաէներգետիկ սարքերի համար, բոյլերների և ճնշող արկունքների, մեծ տուների, գնացքների, արտաքին մեխանիկայի, մոտոցների և հենց իրադարձությունների սարքերի արտադրության ոլորտում՝ գեղարվեստական արկային հանգույցը դարձավ ավանդական հանգույցավորման գործընթացը՝ շարունակելով արտադրանքային հանգույցավորման գործարարության զարգացումը։
Հանգույցի 특성ներ
Գեղարվեստական արկային հանգույցը դժվար է կատարել բոլոր դիրքերում
Արդյոք շատ սահմանափակ են հանգույցի համար պարտադիր նախնական կառուցվածքի համար համապատասխան նյութերը
Դժվար է արագորեն դիտել արկի դիրքը կողմնակից հարթության հարաբերությամբ՝ պահպանելով հանգույցի ճշգրտությունը։ Անհրաժեշտ է ստորագրության համակարգը։
Բոլոր տեխնիկական առավելությունները պահպանում են կայունությունը և հավասարակշռված համակարգի համար։
Ստորագրության համակարգը պետք է ունենա բարձր հասանելիություն, բարձր կայունություն և որոշակի հարաբերություն հանգույցի ճշգրտության համար։
Տրամադրություններ պրոեկտի համար
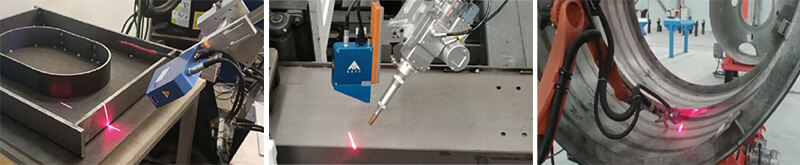
Սովորական աղբյուրով համախումի համախումի համար MinYue Տեխնոլոգիան է փոխանցում WRP-220-ը MY302 բազմառանցքային շարժի կառավարիչով, որպես լրիվ լուծում։ Այս լուծումը կայունություն, վավերություն և երկար ժամանակ կրկնվող կարգավորումներից կազմված է, որը 岠ում է ապահովել միջև գլուխի և սողունաձև կողմերի հեռավորությունը և խանգարելի երկարությունը, որպեսզի համախումի և սողունաձև կողմերի միջև անցումը լինի հավասարակշռյալ, արդյունքով՝ ստանալով լավ սինթեզ կողմերի, ավտոմատ հանված համախումի անոթներ և անընդհատ և երկար ժամանակ ավտոմատ համախում։
Միջոցավորեք օգտագործողի PLC կայունացման աշխատանքը սենսորի + շարժման կառավարիչի լրիվ լուծման միջոցով։ Պլագ և պլայ ստանդարտային մասնավոր մաքինայում, համարում է գծային, օղակաձև սահք, վարունգի հետևություն և այլ режиմներ։ Այս լուծումը կարող է դարձնել 悍ցումը իրականապես ավտոմատացված՝ ոչ միայն փոխանցելով մարդական ուժը, բայց նաև բարձրացնելով աշխատանքի որակը, ինչպես նաև տեխնիկական մակարդակով նվազեցնելով 悍ցուի և 悍ցուի տեխնիկական մակարդակի պահանջները՝ համարելով կայունացման անմարդությունը կամ պակաս մարդուների արդյունքը կայունացման ժամանակ։
Գործնական Առավելություններ
WRP-220 հետ MY302 բազմառուսական շարժի կառավարման սարքը չէ միայն հաջողություն տալիս խաչաձև սահքի ավագրադարձի, այլ նաև հաջողություն տալիս է բազմաթիվ հաղորդագրական մեթոդների, ներառյալ ուղիղ հաղորդագիր, շրջապատում, TIG, բազմաշերտ ցոնակ և այլն, որպեսզի բավարարի հաղորդագրական գործընթացի բազմաթիվ պահանջներին։ Հավանագույն դիամագնիսական և արքային լուսանկարի տարատեսականություն, մեծ աշխատանքային հեռավորություն, փոքր չափսեր, և նույն ժամանակ՝ գոյություն ունի բարձր մակարդակի պաշտպանություն, որպեսզի բավարարի բարձր ճշգրտությամբ հաղորդագրությանը, կիրառվում է հաղորդագրական դիրքի գտնման և իրականացումների հետևության համար։
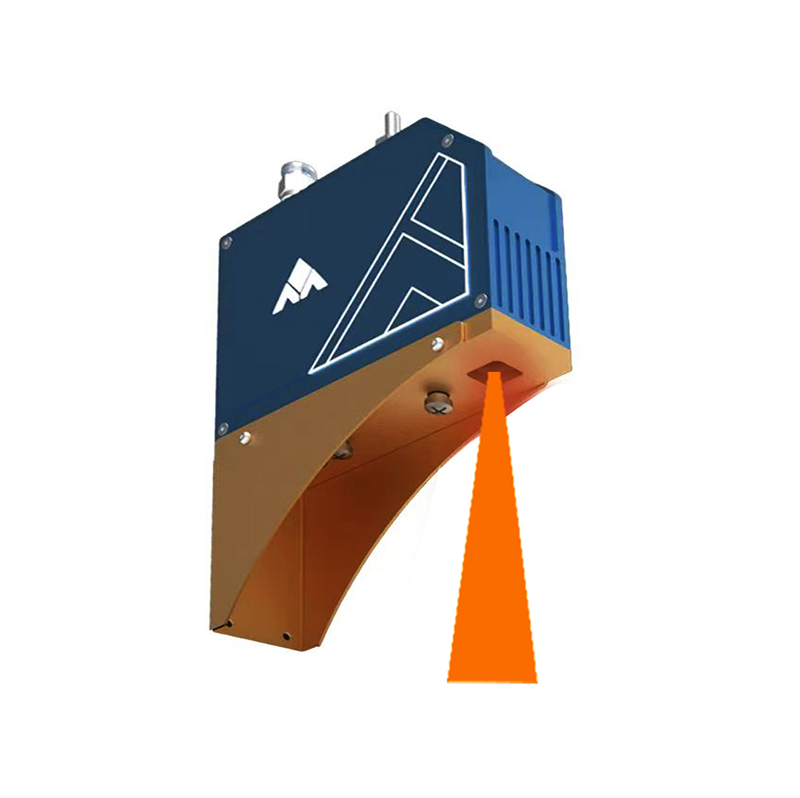
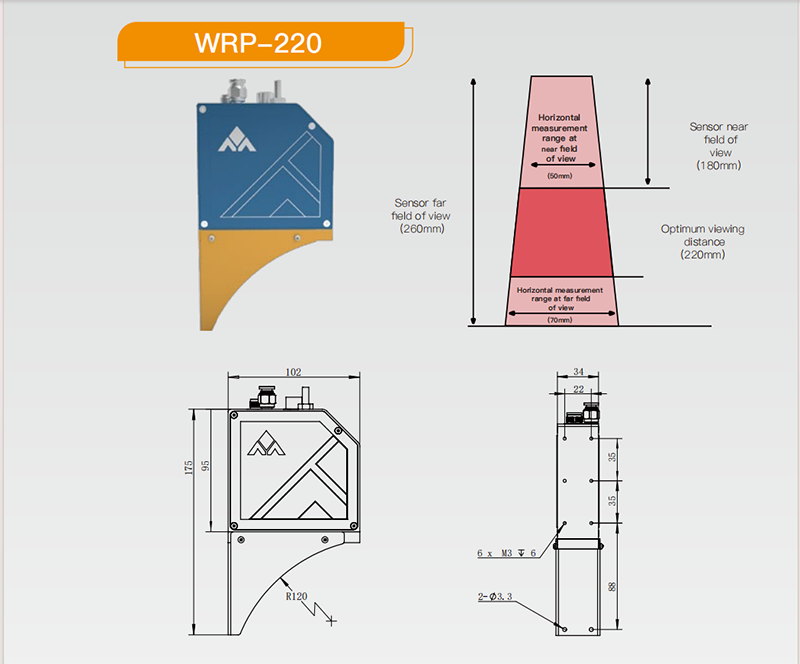
WRP-220 լազերային միության հետ հետևող սենսոր
Լազերական համարձակի հետևության սենսորը օգտագործում է լազեր, որը իրադիացիոնում է համարձակի մակերևույթի վրա՝ ձևավորելով լազերական լուսաբան, որը հաջողությամբ բարձր սահմանումով քամերա ընդունվում է և պատկերացվում։ Ալգորիթմական մշակումով, համարձակի եռաչափ 특ունությունները փոխակերպվում են կառուցվածքային տեղեկատվության մեջ, ներառյալ համարձակի համարանիշները, սխալավորումները, տարածություններ և այլն։ Այս տեղեկատվությունը փոխանցվում է ռոբոտի կառավարիչին, որը տալիս է ռոբոտին անհրաժեշտ տրայեկտորիաները և գործարքի պարամետրերը համարձակի համար, ինձնում է ռոբոտին համարձակի կամ աշխատանքային սխալների ուղղումները իրականացնելու իրական ժամանակում, և հասնում է կատարյալ համարձակի աշխատանքին։ Համեմատաբար այլ լուծումների հետ, լազերական համարձակի հետևությունը ունի ոչ միակոս ու ոչ մուտքագրում, բարձր ճշգրտություն, արագ արագություն և լավ angepատահարարություն։
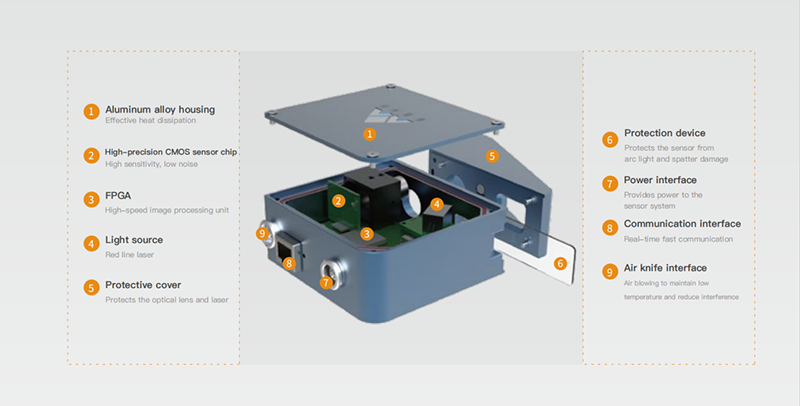
Սենսորը օգտագործում է գծային կառուցվածքով լույսի չափում, որը ունի արագ գծային պատկերացում, չունի կոնտակտ և մեխանիկական շարժումներ; Հզուկ հաստատություն, կարող է արտադրել 悍կան պարամետրեր; Լիցքորեն ներդրված, համակարգացված ինդուստրիալ կոնտրոլային կոմպյուտերների հետ և այլ առավելությունների հետ, այն լայնորեն օգտագործվում է տարբեր տիպերի ավտոմատացված 悍կամանի մեջ: Անկախ 悍կամանի գործառույթից, մենք կարող ենք ապահովել հավիական համագործակցություն և կայուն արդյունքներ տարբեր 悍կամանի սենաrioներում:
Սենսորը համապատասխանում է ամենահարցավոր կիրառություններին, քանի որ այն անզգայաց է անտառային լուսին, ջուրի և աבקի (IP67) և անզգայաց է էլեկտրոմագնիսական ճառագայթման (EMC) դեպքում:
Դուրս գալում է ուժեղ ֆունկցիա:
01. դիրքի և սխալի حيح정:
Դիրքի և սխալի حيح정ի ֆունկցիան օգտագործվում է տարբեր աշխարհամարների համար նախատեսված առաձգական 悍կամանի սենաrioներում, որոնց նույն մոդելն է, բայց տարբեր կիրառություններով: Այս ֆունկցիան համոզված է, որ աշխարհամարների փոխարինման ժամանակ չի պահանջվում ձեռնարկային միջանկյալ, և ռոբոտը հաստատուն է հասնում ճշգրիտ 悍կամանին դիրքի և սխալի حيح정ի համակարգի միջոցով:
Երկու կետերի դիրքը համապատասխանում է ուղիղ գիծ 2D տեղաշարժում 悍կամանի համար:
Բազմակետային դիրքավորում Կիրառելի է բազմահատված 2D տեղաշարժով հաղորդագրությունների համար
Հատվածային դիրքավորում Կիրառելի է բազմահատված 3D տեղաշարժով հաղորդագրությունների համար.
02 Իրական ժամանակի հետևություն
Իրական ժամանակի հետևության ֆունկցիան օգտագործվում է այն հաղորդագրության սենաrios-ներում, որոնք պահանջում են բարձր արդյունավետություն և տարածական հատուկ խափանում չունեն: Սենսորը անշարժ է հաղորդագրության բրիզովին նسبական, և հաղորդագրության բրիզը ավտոմատ կարելի է կարգավորել հաղորդագրության ճանապարհը՝ 3D կոորդինատային տվյալների համաձայն:
03. Սկանավորում և ավտոմատ հաղորդագրություն
Սկանավորման և ավտոմատ հաղորդագրության ֆունկցիան թույլ է տալիս սենսորին առաջին հատուկ ժամանակ հաղորդագրության երկրաչափական տեղեկատվություն հավաքել: Այս ֆունկցիան կիրառելի է բարձր համարձակությամբ, 狹窄 հաղորդագրության տարածքներում և բարդ հաղորդագրության սենաrios-ներում:
Լազերային հաղորդագրության հետևություն
Լազերային հաղորդագրության հետևությունը կարող է ].'նել բարձր, ցածր և ձախ աջ հաղորդագրության շեղումները:
Կարող է ].'նել փոքր տարածքով հաղորդագրությունները:
Լուծում է աստիճանային հաղորդագրության հետևության խնդիրը 溥板 հաղորդագրության համար:
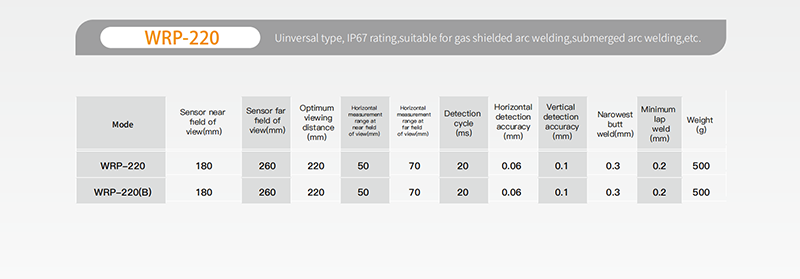
Օպտիմալ aedaկությունը մոտեցած 220 մմ է:
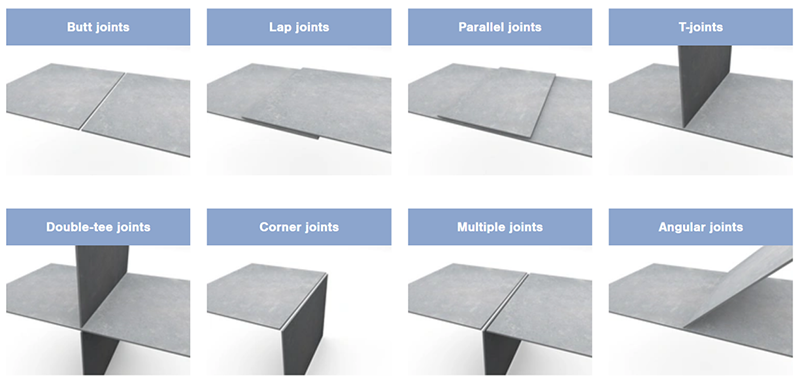
Համարվող համեմատություն
V-գագաթ համեմատություն
Կողմնակի համեմատություն
Համեմատություն համեմատության հետ
Ստորագրության համեմատություն
Նախորդ համեմատություններ, և այլն:
Ազատագրված մոդել, IP67 պաշտպանության մակարդակ, Գործունեություն գազային պահպանման համեմատության, Ենթացի արք համեմատության և այլ աշխատանքային սենարիոների համար:


 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK
