EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


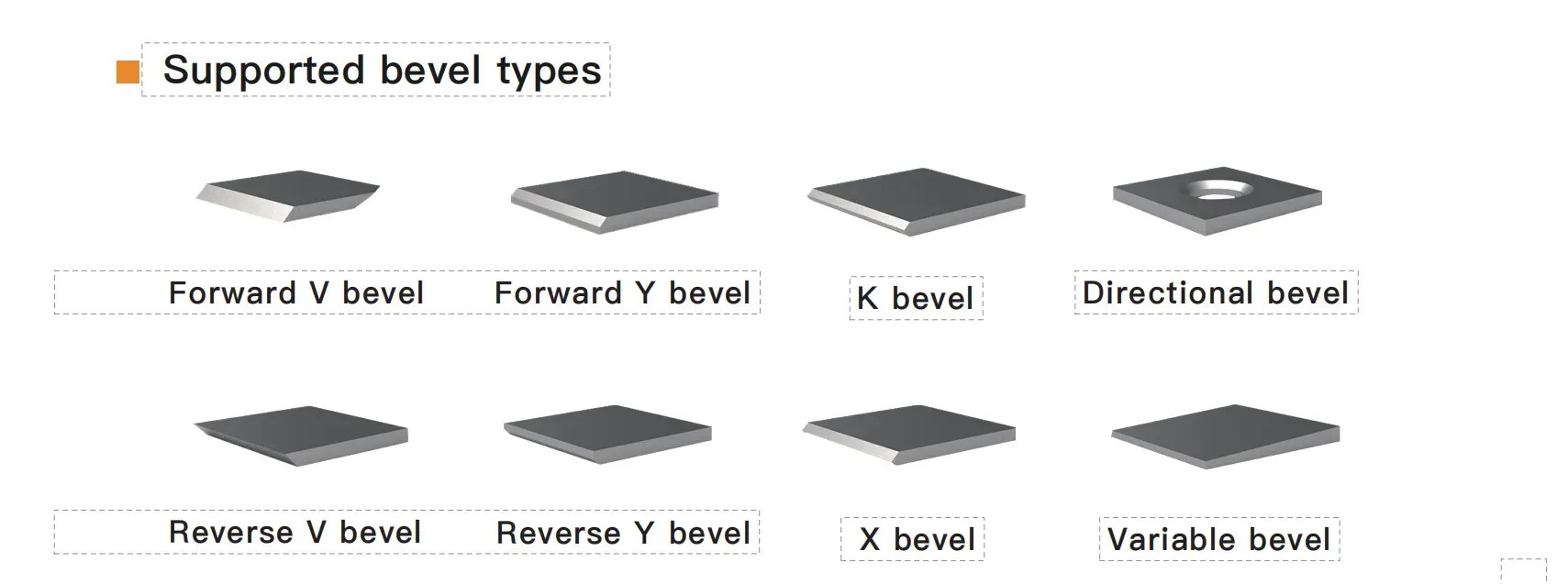
Հեռացված ծրագիր Ինտելիջենտ Անկյունագիծ Սահքի ռոբոտային ստացիոնար
Կոտորակային կտրում Դժվարություններ, արդյունավետության խնդիրներ դառնում են արդյունավետություն խնդիր
Կոտորակային սահք, առաջին գործընթացի համապատասխան համեմատությամբ։ Սպիտակապանության, արտադրանքային կառուցվածքի, կուալ մեքենայի և այլ գործարաններում հասանելի սահքի անցկացման առաջ հարկավոր է սահքափակ նյութերի կոտորակները խմել և միացնել, ապա կատարել ջերմային միացում միաշերտ կամ բազմաշերտ բազմանդամ սահք։ Արդյունավետության խնդիրները դարձնում են արտադրողության կենդանի կետ։ Այսպիսով, սպիտակապանության, արտադրանքային կառուցվածքի և կուալ մեքենայի գործարանները դեռևս են արձանագրում բազմամասն պահանջ ռոբոտական կոտորակային սահքի համար։ Կոտորակային սահքի աշխատանքային տեսակները հաշվում են հազարների կամ տասնհազարների, իսկ աReducersտական տեսակները՝ տասնավոր կամ հարյուրավոր ցուցակներով։ Երբ ավելի և ավելի տարածվում է բազմատեսական, փոքր տոմսերի, համատեղելի արտադրողության պահանջը։
Դիտարկվող արտադրողության փոփոխության արդյունավետությունը սկսել է դժվարանալ արտադրանքային կառուցվածքի, սպիտակապանության, կառուցական մեքենաների և կուալ մեքենայի գործարաններում։
Տարածված սահքի մեթոդները ունեն շատ սահմանափակումներ։
Տարածված սուրքերի կտրումը շուկայում հաճախ կատարվում է ցանցապահոլի միջոցով, låme trolley-ի գրավի կտրումից, հինգ առանցքային մասնավոր կտրումից և ռոբոտական սուրքերի կտրումից:
Համեմատելով անցկաց սուրքերի կտրումների մեթոդներին, արդյունաբերության ռոբոտական սուրքերի կտրումը ճանաչվում է մարդատարների կողմից որպես մեկ ամենաճշգրիտ կտրումների մեթոդ:
Բազմատեսական տեսակների և փոքր bach աշխատանքային մասնիկների դեպքում, հանդիսանում է մեծ սահմանափակումներ առաջացնող առանձնացված ուսուցման այդ ավանդը՝ որը նաև պակասում է սուրքերի մաշկավորության ճշգրտության մասին, կտրումի գործարքային պարամետրերը բարդ են և այլն:
Արդյոք, ռոբոտական կազմակերպությունները, համակարգի ինտեգրատորները և վերջնական օգտագործողները կարող են ունենալ պարզ և հեշտ օգտագործելու «ոչ n-teaching » լուծում:
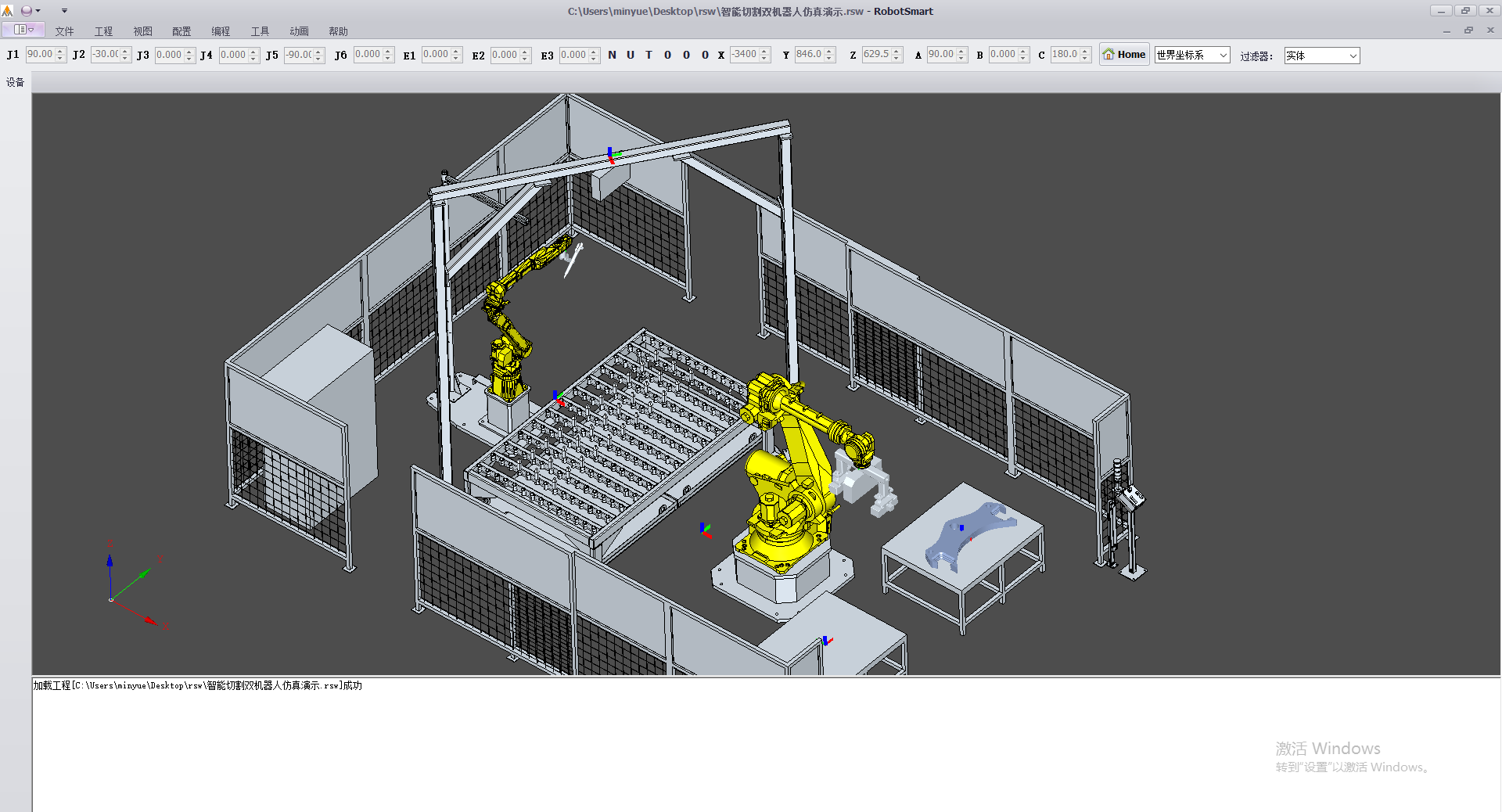
Minyue Intelligent Beveling Cutting Solution կազմված է RobotSmart Ինտելեկտուալ որոնում ,SmartVisions 3D կառուցվածքային լույսի տեսական համակարգ և SmartEye լազերային տեսական հետևման համակարգ իրականացնում է ոչ-դասավանդման ինտելեկտուալ թեք կտրում։ Ամբողջությամբ լուծում է պրոդուկցիայի խնդիրները, որոնք կապված են ծրագրավորման բարդությամբ և ինտելեկտի ցածր մակարդակով, նաև բավարարում է պրոդուկցիայի պահանջներին փոքր շարժի և տարբեր տեսակների աշխատանքային մասերի կտրման համար։ Ավելացնում է մշակումի эффեկտիվությունը և տոկոսը։ Կարող է դիմել ավելի բարդ և տարբեր խնդիրներին։
միայն երեք քայլ՝ 1. գրաֆիկի իմպորտ; 2. արագ տраյեկտորիայի պլանավորում; 3. ավտոմատ ծրագրի ստեղծում, դուք կարող եք ավարտել ձեր կտրման խնդիրները որպես որոշում և քանակ։
Օգտագործման MinYue Technology Ինտելեկտուալ թեք կտրումի ստացիոնար, որտեղ պետք է միայն իմպորտել CAD-ի DXF ֆայլը, սահմանել կտրման պարամետրերը, մի սեղմումով համապատասխանեցնել տեխնոլոգիական պարամետրերը, ավտոմատ ճանապարհի օպտիմալացում, ինտելեկտուալ թեք ճանապարհի պլանավորում, և կտրում թեք մակերևույթները առանց հակառակ կողմի։ Երկուայն կամերա ճանաչել աշխատանքի հատվածի դիրքը, վերցնել և տեղադրել սահքի աղյուսակը: CNC-ն աշխատում է սահքի աղյուսակի վրա, որը վերցնում է աշխատանքի հատվածը սահքից ավարտելուց հետո: Կարող են պատրաստվել տարբեր աշխատանքային հատվածներ միաժամանակ, սահքի տրայեկտորիան ավտոմատացված պլանավորում է, սահքի մակարդակը 0.5-4 մետր է: Դա շատ բարձրացնում է աշխատանքի արդյունավետությունը և ան전ությունը:
Համարում է սահքի սահքման գործառույթներին և պլազմայի սահքման գործառույթներին:
1 Կիրառման շրջանակ
Թ ե սահք գործառույթների ռոբոտային համակարգը օգտագործում է կրկնակի ստացիանային գործառույթային โրբոտ M20ID/25, ինտելիգենտ ոչ ուսուցողական համակարգ, միառնչուն ռոբոտային հոսանք YLV25, սահքի համակարգ և սահքի սահքման համակարգ: աշխատանքային սեղան , ընդհանուր առանցքների քանակը՝ 7 է:
Պատրաստվող աշխատանքի չափսերի միջակայքը՝ 3200*2500մմ ;
Սահքի գործառույթը՝ Սահք
Համարում է տարբեր բեռնատրամադրման և բեռնաբացման ռեժիմներին, ձեռնական բեռնատրամադրում և բեռնաբացում, հավասարակշռված կրանեի բեռնատրամադրում և բեռնաբացում, տարան կրանի բեռնատրամադրում և բեռնաբացում, կրկնակի ռոբոտային համատեղ բեռնատրամադրում և բեռնաբացում, CNC բեռնատրամադրում և բեռնաբացում:
2 արտադրական գործընթաց
Դուրս առնել աշխատանքային հատվածը կտրման աղամասի վրա դասավորելու համար գրավային դիրքավորում (աշխատանքային համարեցության սահմաններում ±5մմ).
Առաջին արտադրությունը սոֆտվերի միջոցով՝ կտրման դիրքի ընտրության համար ավտոմատ գեներացնում է կտրման տրայեկտորիան և պրոցեսային պարամետրեր, ստեղծված ծրագիրը կարող է պահել ը կառավարման համակարգում, հաջորդ արտադրությունների ժամանակ կարող եք այն անմիջապես կêuանել, (RobotSmart-ի ինտելեկտուալ որոշումների համակարգի միջոցով կարող եք տեղադրել 15-20 րոպե ընթացքում).
Կտրման ռոբոտը ճանապարհով աշխատանքային հատվածը ճշգրիտ դիրքավորում է դիտարկում սենսոր
(ավանդները կոնտակտային կոչող գտնելիս արդյունավետության և ճշգրտության միջոցներով)։
Ռոբոտը սկսել կտրում է աշխատանքային հատվածը.
Ռոբոտը անցնում է մեկ այլ աշխատանքային սեղան կտրելու գործողության համար։