 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


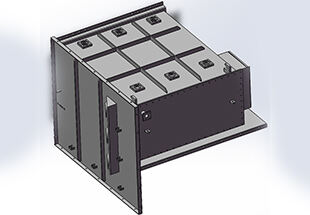
Երկրական անուն Տիպի Ինտելիգենտ Հանձնաժողոված Ռոբոտային stasyon ականջային կառուցվածքների համար

Աշխարհագրական անոթային հաղորդման ռոբոտն արվորված է ինտելեկտուալ Friendess ոչ-տեխնիկական հաղորդման համակարգով և մեծ տեսական հեռավորությամբ ցանցահայտ հետագա հետազոտող։ Կարող է пряма ներմուծել Tekla, SolidWorks կամ UG-ի 3D մոդելային ֆայլերը, пряма համապատասխանեցնել հաղորդման տեխնոլոգիական պարամետրերը, ավտոմատ որոշել ճշգրիտ հաղորդման դիրքը և ստեղծել լավագույն օպտիմալ հաղորդման տեխնոլոգիական գործընթացը հաղորդման համար։
Աշխարհագրական անոթային գործողությունը ավելացնում է երկարության ուղղությամբ համապատասխանությունը։ Ռոբոտը կարող է հաղորդել ավելի երկար ցանցահայտ միաժամանակ, և գործարանը կարող է աշխատել անոթի ձախ և աջ կողմերում։ Հիմնականում օգտագործվում է H-տիպի ստորակետների, սյունակների հիմքերի, փուլիների համարակալման տախտերի, կորբելների և այլ կառուցուածքների հաղորդման համար։
| Ռոբոտ | 1 սետ Fanuc ռոբոտ |
| Según աղբյուր 悍ցման | Aotai 悍ցման մաքինա և նրա հավաքականները կամ Megmeet 悍ցման մաքինա և նրա հավաքականները |
| 悍ցման համակարգ | MINYUE ուսուցող-ազատ ոչ լայնում ծրագրավորման 悍ցման ծրագիր, MINYUE լազերային դիտարկման հետևանքագրության համակարգ։ |
| Կիրառելի սcenարներ | Կիրառելի է հատակային սալերի, կորբելային մասերի, փոքր կառուցավոր մասերի և այլն համար: Հանդիսանում է H-ձևավոր գլխավոր հաղորդապարանների և երկրորդական հաղորդապարանների համար metallական կառուցվածքներում, փոքր և միջին չափի սալային միավորների համար սեղանների միջավայրում, սարքերի H-ձևավոր անունների և սարքերի հաղորդապարանների համար և այլ կառուցվածքներ։ |
| Pистолիտի կարանդաշափումի համակարգ | SC220A պիստոլի կարանդաշափումի համակարգ |
| Աշունավայրի երկարություն | 6 մետր (օպցիոնալ է օգտագործողի համար) |
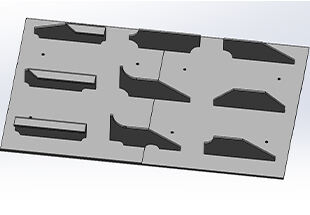
Պիստոլի կարանդաշափումի համակարգ
Սկաների կայքը SC220A համախորհության ստացումն է դրամանշան համալիրների համար: Այն օգտագործվում է ավտոմատ կերպով կարգավորելու համալիրների փոքրագույն մասերը՝ ավտոմատ կերպով ստիրելով համալիրների փոքրագույն մասերը, ստիրելով համալիրների փոքրագույն մասերը, և պաշտպանելով համալիրների փոքրագույն մասերը՝ ավելացնելով համալիրների տեղական ժամանակը և խումբելով գործարարությունը: Համալիրների փոքրագույն մասերը պարզ են և հարմար են օգտագործելու:
Գործարարությունների գործարարությունների գործարարությունների գործարարությունները՝ 1. Գործարարությունների ժամանակը կարճ է և համակարգի օգտագործելի ժամանակը բարձր է: 2. Ավտոմատ կերպով կատարելու համալիրների ստիրումը՝ առանց ձեռնարկային գործողությունների: 3. Պաշտպանելու որոշակի խնդիրները՝ առաջացնելով համալիրների ստիրումը: 4. Համալիրների հետ կապված կալիբրացիայի սալի համար տրամադրված է ռոբոտիկ ՏԿՊ սալը:
Ռոբոտիկ համալիրների ծրագիր
Պրոգրամն կարող է ավտոմատ ձևով հանդիսացնել համեմատությունները նկարներից՝ չօգտագործելով համեմատության նշանակումներ, նվազեցնելով ձեռնարկության մանուալ մասնակցությունը։ Հինքային 3D միջավայրի և ռոբոտային կառավարիչի հետ, ավտոմատ ստեղծված կետերը սիմուլյացվում են և ստուգվում են՝ խոնարանների հանգույցներ փոխարկելու համար իրական աշխատանքի ժամանակ։
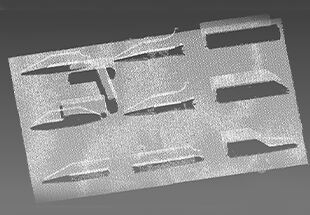
Եւ առանց տիպի գծերի, 3D սկանավորում հակադարձ մոդելավորում, 3D գծերի արագ գեներացում, ռոբոտային 悍կողման jectory-ի ավտոմատ գեներացում, 悍կողման jectory-ի օպտիմիզացիա, վիզուալիզացիա մատակարարության, ավտոմատ հայտնում է 悍կողման torch-ի համակարգի։
LDWP-305 լազերային հետագա համակարգ
LDWP-305 սենսոր է համակարգային տեղադրված գծային սկանավորման համար 悍接 խոչի։ Այն ստանում է 悍接 խոչի բաժանումը գծային լազերային սկանավորմամբ, որը ցուցահանդես ռոբոտի կամ 悍接 մաքնինային ավտոմատացման համար։ Նկարի արտագրումը, մշակումը և 悍接 խոչի որոնումը կատարվում են սենսորի ներսում՝ արտաքին կոմպյուտերի օգտագործման անհրաժեշտություն չունեցնելով։ Դա ունի բարձր ինտեգրացիա և նվազում է համակարգի ամբողջական ardware արժեքը։ Համոզված է արկային լուսավորության և հանգույցի դեմ, ինտելեկտուալորեն որոնում է 悍接 խոչերը, և հեշտ է օպերատիվ։ Դա ունի գեղեցիկ կառուցվածք, կոմպակտ չափսեր, բարձր առանցքային հասանելիություն և բազմազան տեսակներ։ Կարող է ընտրվել և օգտագործվել կիրառական սենարիոյի համար, իսկ ամենահարմար պարամետրերը կարող են բարեկարգել։

Առավելություն
1. Օգտագործում է ոչ ուսուցող ռեժիմ տարբեր արտադրանքների համար, ինչպիսիք են երկշերտ տախտերը, տրասային հանգուները, սուսականքները, մոտավոր տախտերը և տախտային ստանդարտները:
2. Դիզայնի ստագումների ժամանակ չի պետք նշել հաղորդումները, և թիրախային դիրքը կարող է ավտոմատացված ձևով արտագրվել 3D գծագրեր ներմուծելու ժամանակ:
3. Չի պետք մարդկանց միջանկյալ, ռոբոտը ավտոմատացված ձևով կատարում է այնպիսի գործողություններ, ինչպիսիք են՝ զրոյական վերադարձ, փոխանցում, դիրքի գտնում, հաղորդում, հաշվում և մատուցիչի կLEANing:
4. Չի պետք տեղական գործունեություն, ծրագիրը կարող է ստեղծվել ցանկացած ժամանակ և տեղ, և հեռապար կարող է ուղարկվել ռոբոտին նշված ժամանակին համապատասխան:
5. Ավտոնոմ ծրագրավորման տեխնոլոգիա, 1:1 սիմուլյացիա ռոբոտի շարժումների, նախատեսում է ռոբոտի 섭ակումները և հաղորդումները:
6. ცифրական երկունքային տեխնոլոգիան կարող է ցուցադրել տեղական ռոբոտի տրայեկտորիան, հաղորդման լարում, համար, արագություն և այլ արտադրողական տեղեկատվություններ իրական ժամանակում:
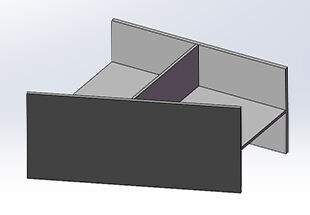
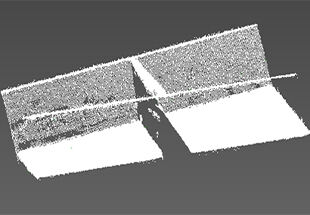
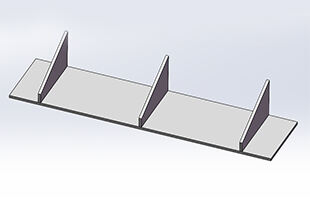
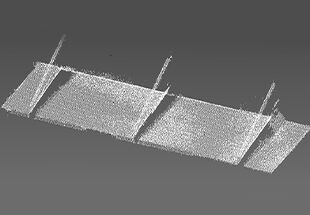
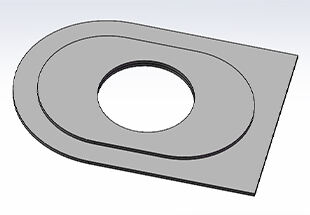
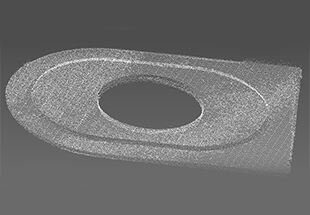
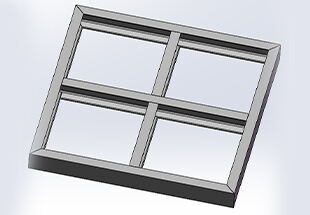
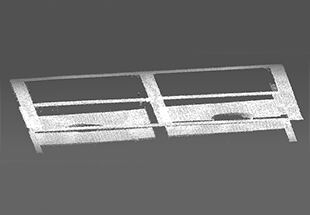
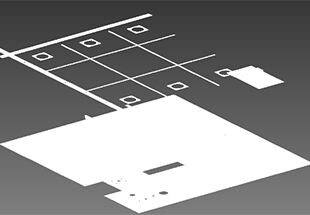
| (NO) ՈՉԻՐ | Աշխատանքի տեսակ | Աշխատանքի մոդելի պատկեր | Աշխատանքի կետերի պատկեր |
| 1 | H Բեմ (娷ում է հաղորդումներ) | 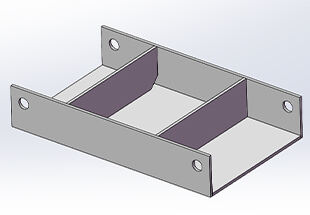 |
 |
| 2 | Պլատե միավոր |
 |
 |
| 3 | Արկանգ կորբել |
 |
 |
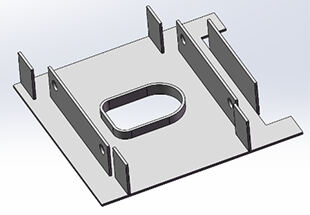
| 4 | Բաշխապատվող |
 |
 |
| 5 | Պուռլին համարձակ սալ |
 |
 |
| 6 | Կլոր տուբ հիմք |
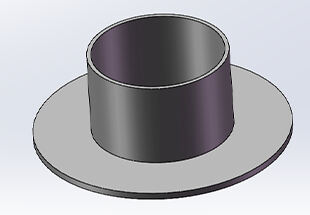 |
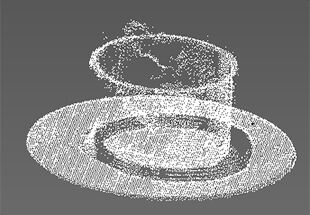 |
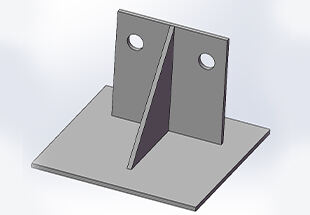
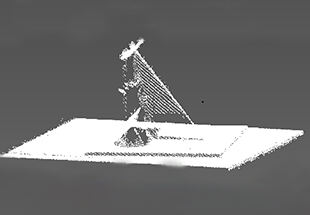
| 7 | ($) Կայուն տուբ հիմք |
 |
 |
| 8 | Նաև մակերևույթ |
 |
 |
| 9 | Երկշերտ տախտ |
 |
 |
| 10 | Կանալ հացի ժամանակ |
 |
 |
| 11 | Երկուցիկ 悍接 lap joint | 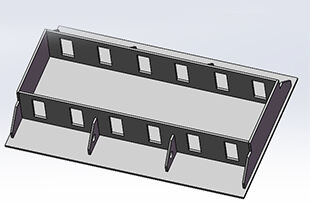 |
 |
| 12 | Box գիրդեր |
 |
 |
| 13 | Անկանոն ծռման հաղորդում |
 |
 |
| 14 | Տրանսֆորմատորի թույլ |
 |
 |





