 EN
EN
 AR
AR HR
HR NL
NL FR
FR DE
DE EL
EL HI
HI IT
IT JA
JA KO
KO PT
PT RO
RO RU
RU ES
ES TL
TL IW
IW ID
ID LV
LV LT
LT SR
SR SK
SK UK
UK VI
VI GL
GL HU
HU TH
TH TR
TR FA
FA AF
AF MS
MS MK
MK HY
HY AZ
AZ KA
KA UR
UR BN
BN LA
LA MN
MN KK
KK
Աշխարհի ամենաբարձր 10 մետրական հիդրոավանդակության համակարգը արդեն ավարտել է իր առաջին փոխանցման ցիկլը։ 6.5 մետրից, 7 մետրից, 8 մետրից մինչև 10 մետրի բարձրության աճը ոչ միայն թվային սեղմում է, այլ նաև հիմնական նյութերի, մշակող ավարտական սարքերի, տեխնիկական գործընթացների և գνացական գաղափարների համատեղելի ավարտում է, ցույց տալով տեխնոլոգիական առաջադրանքի շարժը։
Հիդրոավանդակության 悍համարելի գործընթացի խնդիրները:
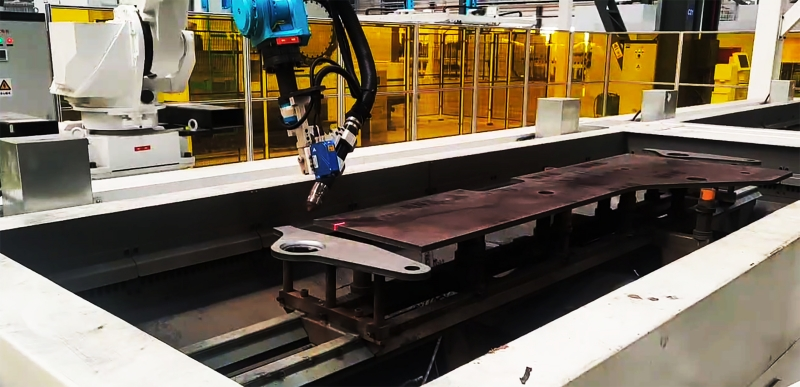
1. Ստрукտուրային մասերը տուփաձև 悍համարելի կառուցվածքներ են, որոնց համար գեղարվեստները խտությամբ են, կարող են բարձր կառուցվածքային ուժեր ունենալ և բարդ գործընթացներ են։
2. Բազմաթիվ տեսակներ, փոքր բացահայքներ, հաճախորեն աշխատանքի փոփոխություններ, դասավանդման ծրագրավորման մեծ աշխատանքային բեռ, և ցածր մաքսավելիք։
3. Աշխատանքային նահանջի սխալներ, միացումի սխալներ, նյութերի սխալներ, հաղորդման ջերմային ձգվածքը, բոլորը ազդում են հաղորդման ճշգրտության վրա։
4. Աշխատանքային օբյեկտների հատուկ ձևերը և չափերը պահանջում են բազմաթիվ ռոբոտներ, բազմաթիվ արտաքին առանցքներ, դիրքավորիչներ և համատեղական աշխատանք, բարդ տրայեկտորիայի պլանավորում և անինչան հաղորդման ճանապարհներ։
Minyue Technology-ը հանդիսանում է ענקիգանների հետ միանալու, գերակենտրոններին կենտրոնացնելու և միակ կետում հասնելու վրա։ Հանդիսանում է անընդհատ ثم R&D-ի մեջ և արդեն է արտածել դասավանդման առանց դասավանդման մատակարար լուծում։
Քայլ 1. Օգտագործողները ներմուծում են եռաչափ աշխատանքային մոդելը RobotSmart - Երկարաժամանակյա 抉որոշումների համակարգ։
Եtape 2: RobotSmart - Ավտոմատացված 抉cision Համակարգ, որը հիմնված է Minyue Technology-ի AI հաղորդագրման և սահքման տվյալների մոդելի և մեծ տվյալների բազայի վրա, առաջարկում է հզոր հաղորդագրման ռոբոտային ֆունկցիաներ առաջին, կողմից, հակառակ, գանտրի կառուցվածքների համար, բազմաթիվ ռոբոտների, բազմաթիվ արտաքին առանցքների և դիրքաշխարհների համար՝ ավտոմատացված jectory պլանավորման և համատեղելի աշխատանքի համար։
Բազմաթիվ ռոբոտների, բազմաթիվ արտաքին առանցքների և դիրքաշխարհների ավտոմատացված պլանավորման միջոցով, ավտոմատացվածում է օպտիմալ հաղորդագրման jectory։ Սա նվազում է ստրեսի կենտրոնացման, նշանակալիորեն նվազում է ձգողությունը և ներքին ստրեսը, ինչը эффեկտիվորեն éliնում է հաղորդագրման հետ կառուցվածքային կոմպոնենտների մեխանիկական վիճակը։
Ավտոմատացված գեներացիա արդյոքական ռոբոտի շարժման կոդերի համար՝ արդյոքական ռոբոտի շարժման սիմուլյացիայի, համադրության հայտնաբերումի, միակության հանգումի և առանցքի սահմանափակումների հայտնաբերումի համար՝ իրականացնելով 180 աստիճանի ազատ վերադարձում և հաղորդագրման անհատական տարածքի համար կառուցվածքային կոմպոնենտների համար։
Առաջին շերտի 悍ցման ժամանակ դիրքավորիչի կառավարումով, երկրորդ շերտի 悍ցման պահին կատարվում է նախնական ջերմաստիճանային բարձրացում, որը նպատակաորինացված է 悍ցման տրամագույների, թուղթերի, պարունակող նյութերի, անստորագույն միացման և անստորագույն անցման պարհեզման հարմարավետության համար 悍ցման գործընթացի ժամանակ:
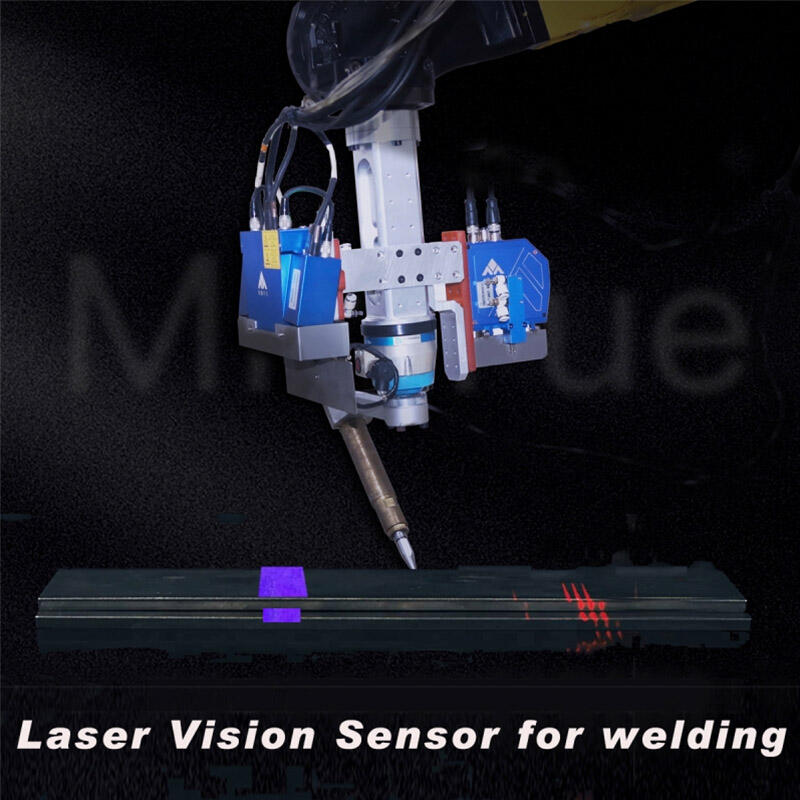
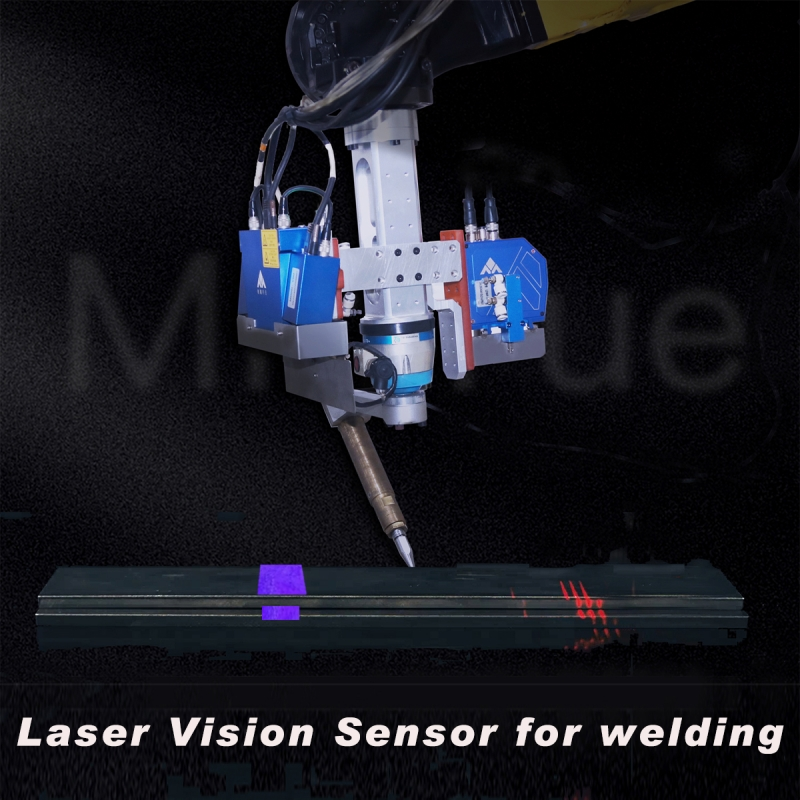
Եtape 3: SmartEye - 悍ցման հատվածի հետևանքագրության համակարգ, որը ունի հզոր 悍ցման գործընթացի գրադարան, ավտոմատ պլանավորում է 悍ցման գլուխի տեղափոխությունը, 悍ցման դուրս-մուտք անկյունները տարբեր սանդղակների գործընթացի համար տարբեր անկյուններում և տարբեր սալի հաստություններում, աջակցում է բազմաշերտ և բազմահատված 悍ցման հարթ և ուղղահայաց դիրքերում:
Սկանավորեք 悍ցման հատվածը, 妋որեն հաստատեք 悍ցման հատվածի դիրքը և տեղեկատվությունը, حيحում ենք եռաչափ մասի մոդելը և իրական աշխատանքային մասի 悍ցման հատվածի դիրքը, լուծում ենք սխալացման խնդիրը, որը ներկայացնում են նյութի սխալները և ջերմային ձգվածքը:
Գործարանային հարաբերությունը ավելացել է 30%-ով, աշխատանքային արդյունավետությունը ավելացել է 100%-ով, իսկ գործարանային ցիկլը կրճատվել է սկսած 28 օրից մինչև 9 օր: