EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


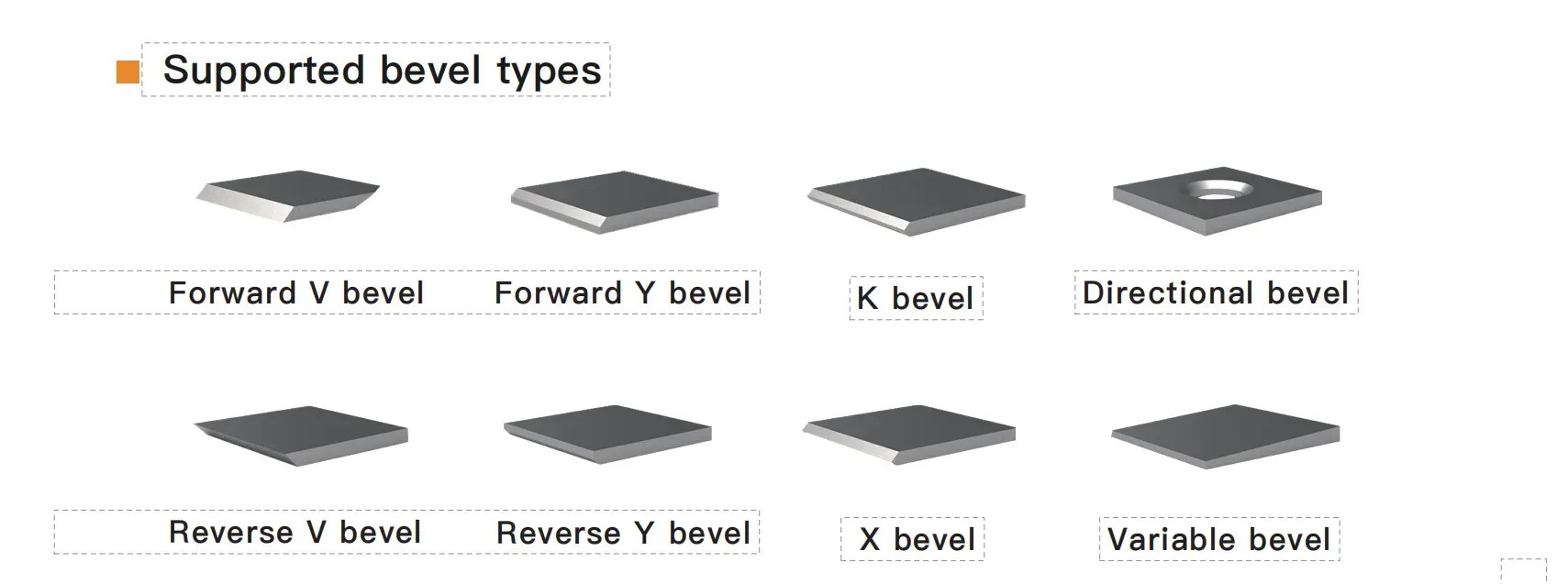
Bez programa pametno kosovo režanje robotičke stanice
Šiljeno rezanje Problematicni punkti, problemi učinkovitosti postaju proizvodnju uzavreli punkt
Strmivanje rubova, spojivanje u predzadnjem procesu. Prije spojivanja debelih ploča u brodogradnji, ocelinskim konstrukcijama, ugljenoj mašinstvi i drugim industrijskim oblastima, potrebno je strmiti rubove materijala koji se spojuju i grupirati ih zajedno, a zatim izvršiti toplinsko jednoslojno ili višeslojno višeprolazno spojivanje. Problemi s učinkovitosti postaju uzorište proizvodnje. Stoga su brodogradnja, ocelinske konstrukcije i ugljeno mašinstvo izdali veliku potrebu za robotskim strmivanjem rubova. Vrste radnih komada za strmivanje rubova iznose hiljade ili desetku hiljada, a pojedinačne vrste računaju se serijalno desetkama ili stotinama. S potrebnom fleksibilnom proizvodnjom više vrsta i malih serija postaje sve popularnije.
Postoji hitna potreba za povećanjem učinkovitosti promjene proizvodnje u industrijskim oblastima poput ocelinskih konstrukcija, brodogradnje, građevinskog mašinstva i ugljenog mašinstva.
Tradicionalne metode rezanja imaju mnoge ograničenja.
Tradicionalno režanje kosih rubova na tržištu općenito koristi brusilne strojeve, flamske voze s označavanjem, režanje petoosijskim specijaliziranim reznim strojem i robotskim režanjem kosih rubova.
U usporedbi s prethodnim metodama režanja kosih rubova, industrijsko robotsko režanje je od strane proizvođača priznato kao jedna od najtočnijih metoda režanja.
U slučaju više vrsta radnih materijala i malih serija, tradicionalni način podučavanja ima velike ograničenja, a postoji nedostatak točnosti obrade tupog ruba, složeni su parametri režanja i slično.
Kao posljedica, tvrtke za robote, integratori sustava i krajnji korisnici imaju otuđeno potrebu za jednostavnim i lako koristivim rješenjem 'bez podučavanja '
Minyue Intelligent Beveling Cutting Solution se sastoji od RobotSmart Inteligentnog odlučivanja sustava , SmartVisions 3D strukturnog svjetlosnog vizuelnog sustava i SmartEye sustav praćenja laserne videoprijeve ostvarivanje inteligentnog kosa sjecišta bez nastavničke upute. Potpuno riješiti proizvodne bolišta teškog programiranja i niske razine inteligencije, zadovoljava i zahtjeve za presjek male serije i različitih vrsta radnih dijelova. Poboljšajte učinkovitost obrade i iznos. Lica više složenim i raznovrsnim zadatacima.
samo tri koraka: 1. uvoz crteža; 2. brzo planiranje trajektorije; 3. automatsko generiranje programa, možete završiti svoje presječne zadatke s kvalitetom i količinom.
Upotreba MinYue Technology Radna stanica inteligentnog kosog sjecišta, samo morate uvesti DXF datoteku iz CAD-a, prilagoditi parametre presjeka, jednim tipkom pridružiti tehnološke parametre, automatizirano optimizirati stazu, pametno planirati stazu kosog sjecišta, i presijecati gornje i donje kosog sjecišta bez obrtanja. kAMERA za prepoznavanje položaja radnog materijala, hvatanje i smještanje na reznu ploču. CNC radi na reznoj ploči nakon što je rezanje završeno. Prilagođeno je za različite radne materijale istovremeno, automatsko planiranje režne traktorije, raspon rezanja 0,5-4 metra. Značajno poboljšava radnu učinkovitost i sigurnost.
Podržava proces plamenog rezanja i plazmenog rezanja.
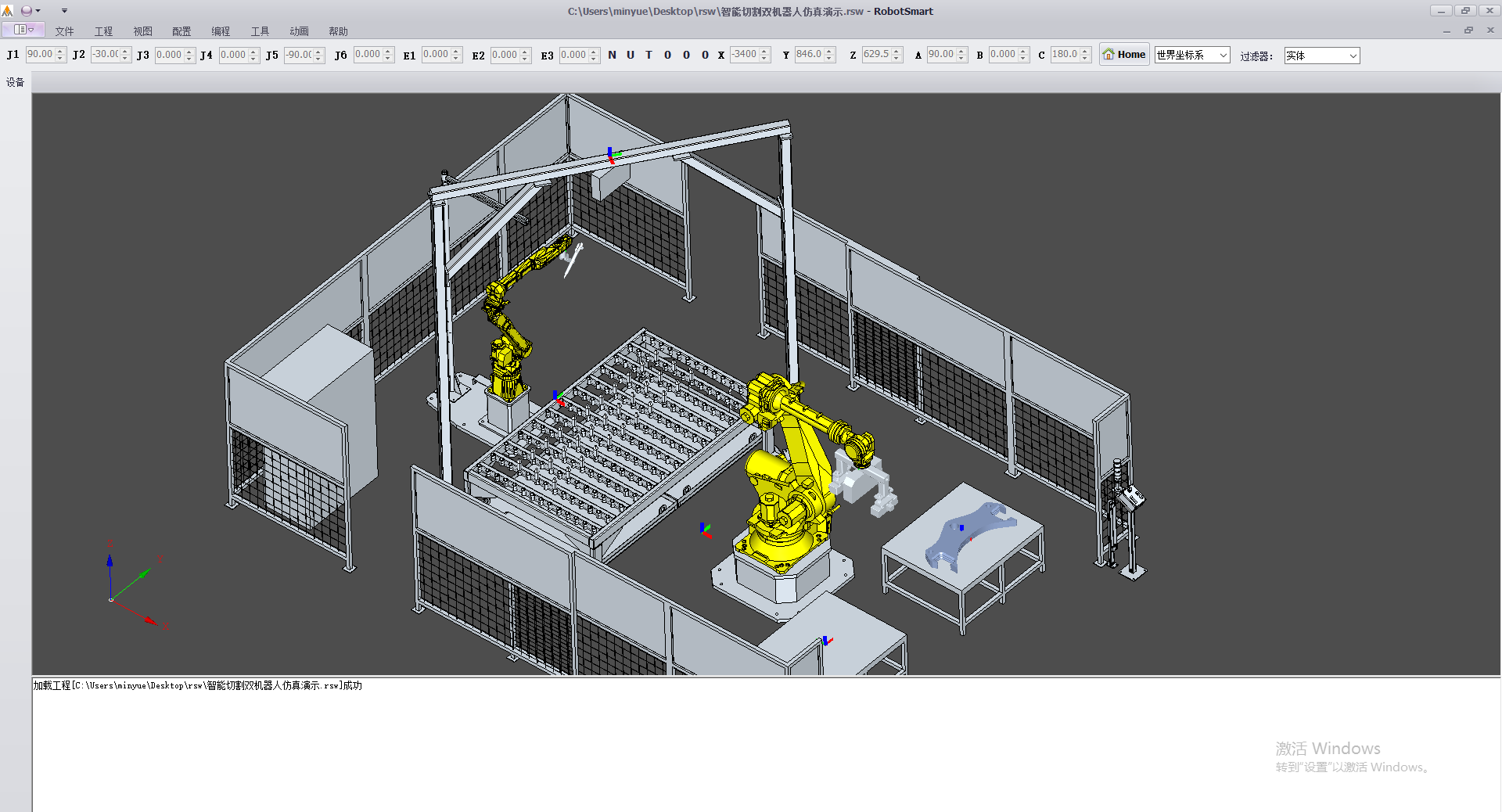
1 Opseg primjene
TH e cutt ing robotni sustav koristi dvostanijski način rada, sastoji se od M20ID/25 inverznog robota, inteligentnog ne-naučnog sustava za svarenje, jednoosnog robota YLV25, sustava za plameno rezanje i plamenog rezanja rADNA PLOČA , s ukupnim brojem 7 osi.
Prilagođena veličina radnog materijala: 3200*2500mm ;
Rezni proces: Plamen
Podržava različite načine opterećivanja i ispraznjava, ručno opterećivanje i ispraznjava, opterećivanje i ispraznjava ravnotežnim kranom, putem kranova za vožnju, suradnju dva robota pri opterećivanju i ispraznjava, CNC opterećivanje i ispraznjava.
2 proces proizvodnje
Ručno postavite radnik na reznu ploču za ruđe pozicioniranje (unutar ±5mm ponovljivosti radnika).
Prva proizvodnja putem softvera omogućuje odabir rezne pozicije, automatski generirani trajektorijski i procesni parametri, program koji se može spremiti uređaj u upravljački sustav, pri čemu se u daljnjoj proizvodnji može izravno pozvati, (putem inteligentnog odlučivanja sustava RobotSmart može biti implementiran unutar 15-20 minuta).
Rezni robot precizno pozicionira radnik pomoću lasera vizija senzor
(prednosti u usporedbi s kontaktnim pronašivačima rubova s obzirom na učinkovitost i preciznost).
Robot početak reže radnik.
Robot prelazi na drugi rADNA PLOČA za režnu operaciju.