EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


3D विज़न बीवल प्लाज़्मा रोबोट कटिंग
कार्य क्षेत्र:
सकारात्मक झाग: 100x100-7000x1200mm@20-45°
विपरीत झाग: 100x100-6800x1000mm@40-60°
गैर-शिक्षण बुद्धिमान बीवेल कटिंग
अग्र प्रक्रिया के बेवेल कटिंग और वेल्डिंग में, गुणवत्ता और कार्यक्षमता से संबंधित समस्याएं उत्पादन में बोतलगली का कारण बन सकती हैं, विशेष रूप से छोटे भागों के बेवेल करने में। अब तक छोटे भागों के बेवेल के लिए पारंपरिक फ्लेम कटिंग व्यापक रूप से उपयोग में है, जिसमें प्रारंभिक चिह्नित करना, रखना, और फ्लेम ट्रॉली द्वारा बेवेल करना आवश्यक है, और इसके लिए कम स्थान की आवश्यकता होती है। प्रत्येक बार कार्य बदलने पर, उसे फिर से अलग-अलग प्रारंभिक गरम करने की आवश्यकता होती है। इसलिए, पारंपरिक फ्लेम कटिंग प्रक्रिया में बेवेल की सीमा में असंगति, खराब गुणवत्ता, कम कार्यक्षमता, अधिक श्रम की आवश्यकता, और कम अनुप्रयोग की विस्तृतता जैसी कमियां होती हैं।
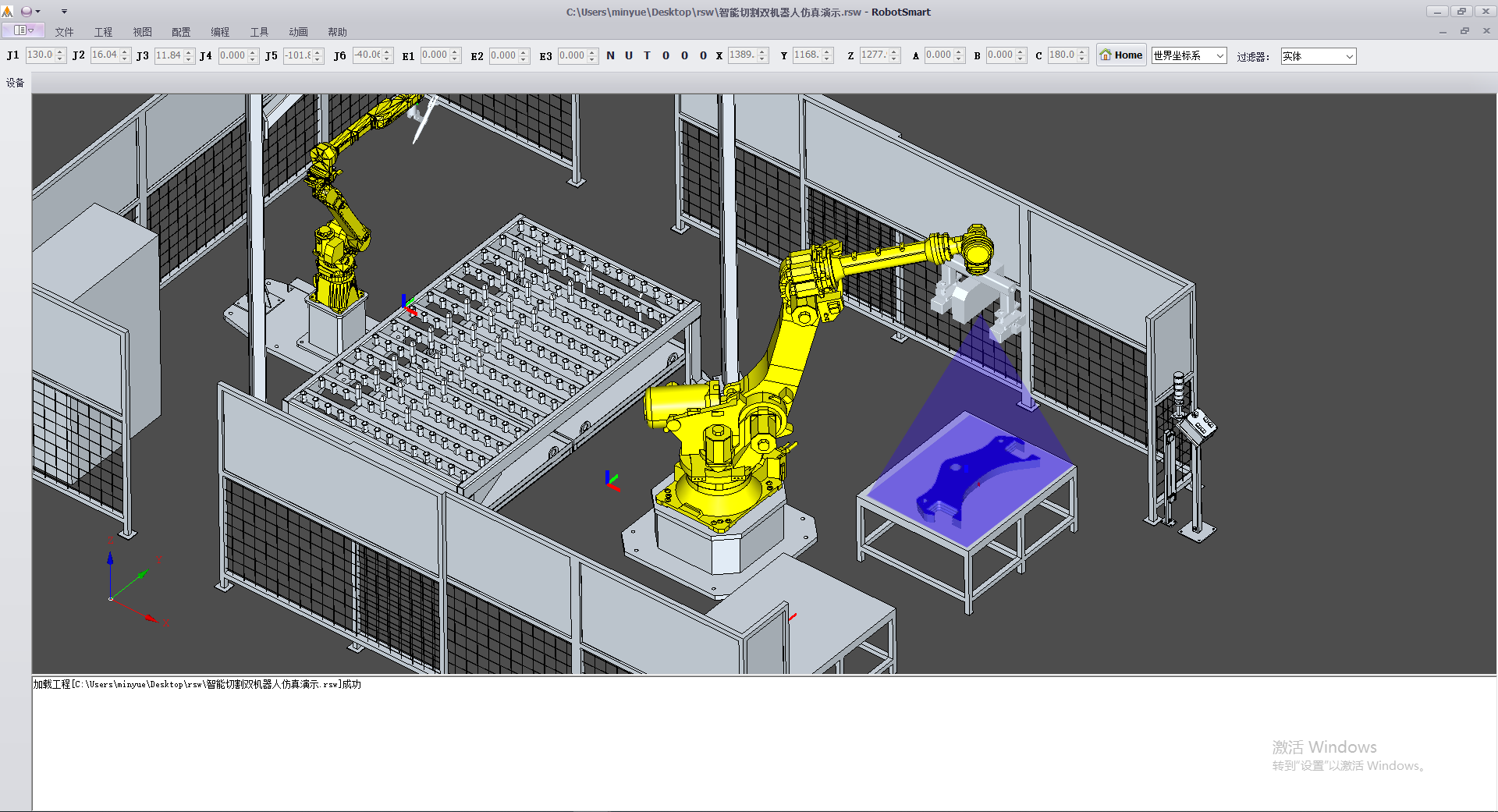
MINYUE TECHNOLOGY गैर-शिक्षण बुद्धिमान कोण काटने का उपयोग RobotSmart बुद्धिमान निर्णय प्रणाली, SmartVisions 3D दृष्टि प्रणाली और SmartEye लेज़र ट्रैकिंग प्रणाली का उपयोग करता है, जिससे 'गैर-प्रोग्राम + दृष्टि' बुद्धिमान कोण काटने की सफलता होती है। कठिन प्रोग्रामिंग और बुद्धिमानता के कम स्तर के उत्पादन समस्याओं को हल करते हुए, यह विभिन्न प्रकार के छोटे बैचों के काटने की मांगों को पूरा करता है, संसाधन की दक्षता और उत्पादन की दर में सुधार करता है।

अधिक जटिल और विविध कार्यों के सामने, केवल तीन कदम हैं।
1. CAD DXF फ़ाइलों का इम्पोर्ट करें; 2. तेजी से त्रजेक्टरी योजना बनाएं; 3. काटने के प्रोग्राम का स्वचालित उत्पादन, फिर काटने का कार्य तेजी से पूरा हो जाता है।
स्वचालित काटने की पथ अनुकूलन, कोण पथों की बुद्धिमान योजना, ऊपरी और निचले कोणों का विपरीत काटना नहीं।
बाइनोक्यूलर कैमरा चित्र लेता है ताकि कार्यपीस की स्थिति को पहचानने और कटिंग टेबल पर उठाने और रखने के लिए। कटिंग पूरी होने के बाद CNC काम करने वाले कटिंग टेबल पर जाता है। एक साथ कई कार्यपीस को समायोजित किया जाता है, और कटिंग ट्रैजेक्टरी स्वचालित रूप से योजित की जाती है, कटिंग की सीमा 0.5 से 4 मीटर है। यह कार्यक्षमता और सुरक्षा में महत्वपूर्ण सुधार करता है। फ्लेम कटिंग प्रक्रिया और प्लाज्मा कटिंग प्रक्रिया का समर्थन करता है।
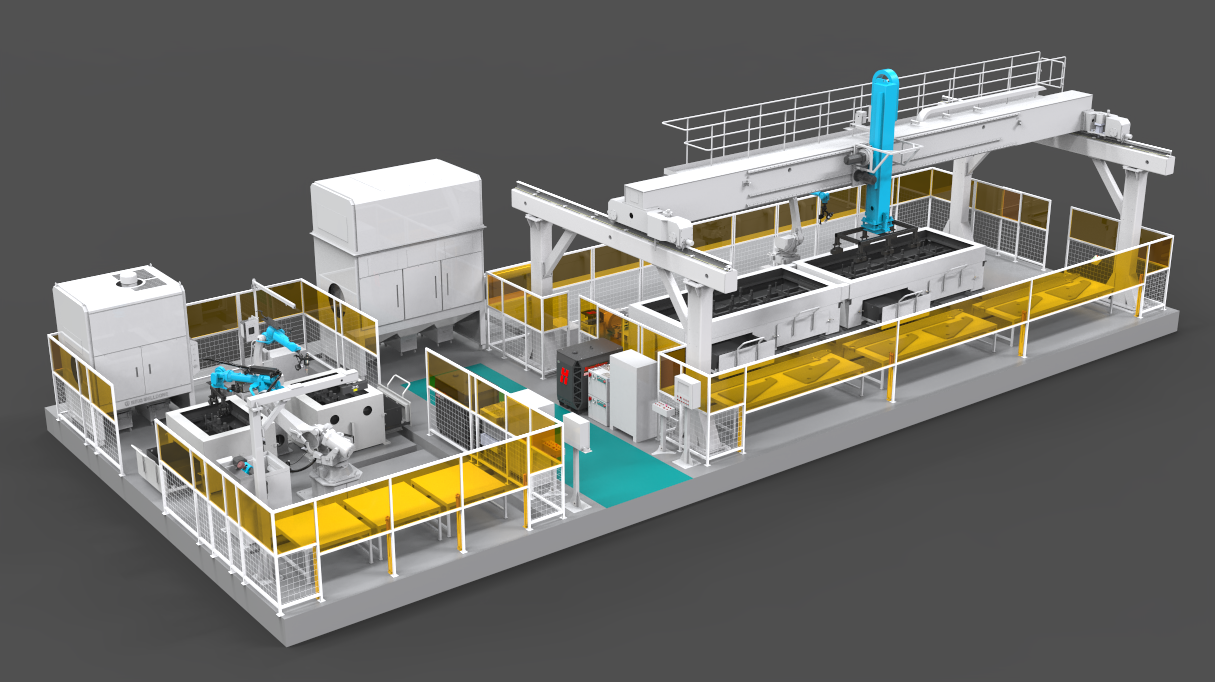
विभिन्न लोडिंग और अनलोडिंग मोड का समर्थन करता है, हाथ से लोडिंग और अनलोडिंग, कैंटिलीवर क्रेन लोडिंग और अनलोडिंग, ट्रेवलिंग क्रेन लोडिंग और अनलोडिंग, डबल रोबोट सहयोगी लोडिंग और अनलोडिंग, CNC लोडिंग और अनलोडिंग।
उत्पादन प्रक्रिया
● हाथ से कटिंग टेबल पर कार्यपीस की रूढ़ स्थिति (कार्यपीस स्थिति की पुनरावृत्ति ±5mm के भीतर)।
● सॉफ्टवेयर के माध्यम से पहली उत्पादन, जो अपने आप से चयनित कटting स्थिति के लिए ऑटोमैटिक रूप से उत्पन्न कटting माप का पथ और प्रक्रिया पैरामीटर, प्रोग्राम उत्पन्न किया जा सकता है कंट्रोल सिस्टम में स्टोर किया जा सकता है, बाद की उत्पादन को बुलाया जा सकता है। (RobotSmart इंटेलिजेंट डिसिशन प्लेटफॉर्म सिस्टम के माध्यम से 15-20 मिनटों में डिप्लॉय किया जा सकता है।)।
● कटting रोबोट लेज़र विज़न सेंसर का उपयोग करके कार्य पदार्थ को सटीक रूप से स्थिति देता है। (लाभ: स्पर्श से बेहतर कुशलता और सटीकता के साथ फाइंडर किनारे की तुलना में।)।
● ग्राउंड रेल गैंगी कैंटिलीवर रोबोट वर्कस्टेशन का समर्थन करता है।
● खंडित अनुप्रयोग परिदृश्यों के लिए 12 समाधान जारी किए गए।
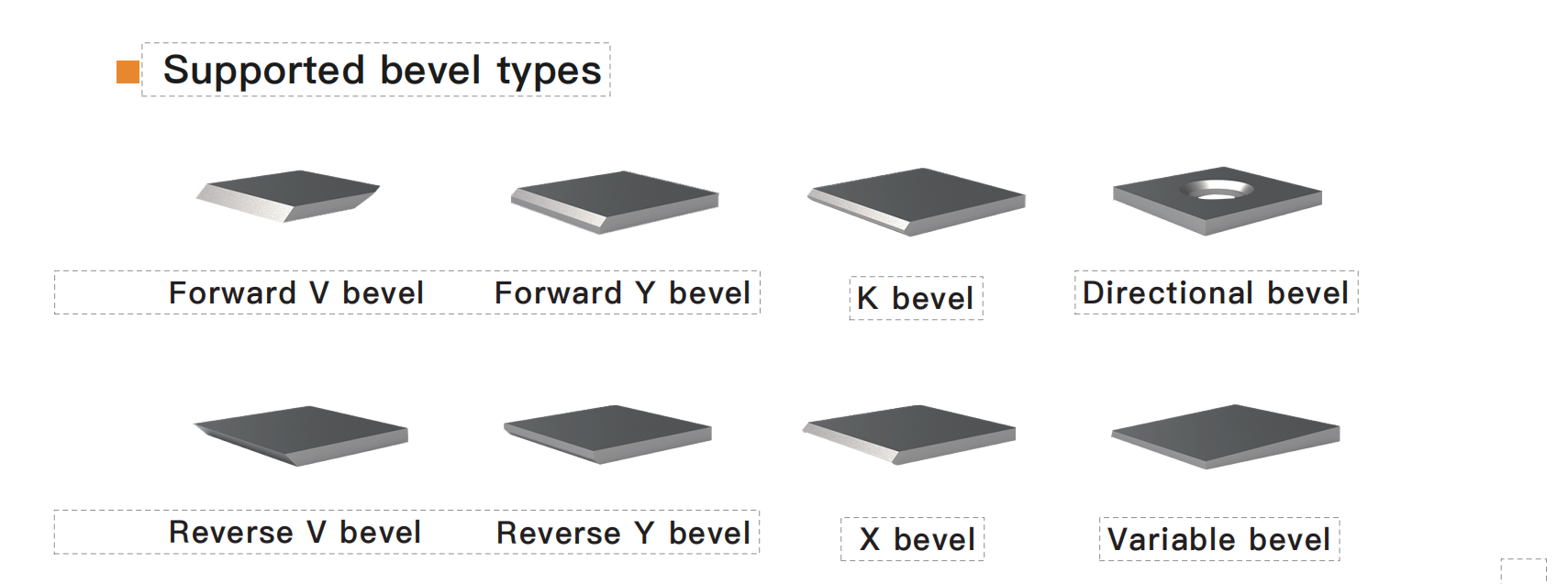
समर्थित तिरछा प्रकार