 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Σταθμός Εξυπνού Ρομπότ Συνδεσιούχρωσης Με Ραλλιά Επιφάνειας Γης για Χαλκοδομικές Δομές

Ο ρομπότ κατακόλλησης με ραλλί στο έδαφος είναι οπλισμένος με εξυπνό σύστημα κατακόλλησης Friendess χωρίς τεχνικές γνώσεις και μεγάλη απόσταση οπτικής ακολουθίας συμβάσματος. Μπορεί να εισάγει άμεσα τα αρχεία 3D μοντέλων του Tekla, SolidWorks ή UG, να ταιριάζει άμεσα τους παραμέτρους διαδικασίας κατακόλλησης, να αναγνωρίζει αυτόματα την ακριβή θέση κατακόλλησης και να δημιουργεί την καλύτερη βελτιστοποιημένη διαδικασία κατακόλλησης για κατακόλληση.
Η άξονας περπάτησης με ραλλί στο έδαφος αυξάνει την ευρυφάνεια στην κατεύθυνση μήκους. Ο ρομπότ μπορεί να συνδεθεί με το ραλλί στο έδαφος για να κολλήσει μεγαλύτερο συμβασματικό μήκος μιας φοράς, και η θέση εργασίας μπορεί να λειτουργεί στις δύο πλευρές του ραλλιού. Χρησιμοποιείται κυρίως για την κατακόλληση των πινάκων ράμματος H, των βάσεων στηλών, των πινάκων υποστήριξης των καρέκλων, των επεκτάσεων και άλλων δομών.
| Ρομπότ | 1 σύνολο ρομπότ Fanuc |
| Προαιρετική πηγή δυναμικής καύσης | Συσκευή καύσης Aotai και τα πρόσθετά της ή συσκευή καύσης Megmeet και τα πρόσθετά της |
| Σύστημα καύσης | Λογισμικό MINYUE για διδασκαλία χωρίς offline προγραμματισμό, σύστημα ακολουθίας λέιζερ vision MINYUE. |
| Εφαρμόσιμα σενάρια | Ικανοποιεί για πλάκες υποδομής, μέρη κορβελ, μικρά κατασκευαστικά μέρη, κλπ. Μπορεί να χρησιμοποιηθεί σήμερα σε κύρια διαμετρικά H-μορφής και δευτερεύουσα διαμετρικά των χάλκινων κατασκευών, μικρά και μεσαία μονάδα πλακών σε γέφυρες πλοίων, εξοπλιστικά H-μορφής κολόννες, εξοπλιστικά διαμετρικά πλατφόρμες και άλλες δομές. |
| Σύστημα καθαρισμού πιστόλι | Σύστημα καθαρισμού πιστόλι SC220A |
| Μήκος ρακέτας εδάφους | 6 μέτρα (προαιρετικά σύμφωνα με τον χρήστη) |
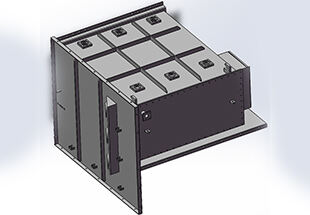
Σύστημα καθαρισμού πιστόλι
Η σταθμή καθαρισμού πιστόλιων SC220A είναι ένα συσκευάσιο για την καθαριστική διαδικασία των πιστόλιων συγχώνευσης ρομπότ. Χρησιμοποιείται για να καθαρίζει αυτόματα το καταλείψιμο του πιστόλιου συγχώνευσης κατά τη διάρκεια της συγχώνευσης με ρομπότ, να κόβει αυτόματα καλώδια και να προστατεύει το στόμιο και το επαφειακό άκρο του πιστόλιου, μεγιστοποιώντας τη διάρκεια ζωής του πιστόλιου και εξοικονομώντας χρήματα. Μειώνει τις δαπάνες για καταναλωτικά, διατηρεί καλή ποιότητα συγχώνευσης και βελτιώνει την αποτελεσματικότητα της συγχώνευσης. Απλή λειτουργία και εύκολη χρήση.
Προβλέψεις των σταθμών καθαρισμού πιστόλιων: 1. Το χρόνο καθαρισμού του πιστόλιου είναι μικρός και η διαθεσιμότητα του συστήματος υψηλή. 2. Αυτόματη ολοκλήρωση της διαδικασίας καθαρισμού του πιστόλιου χωρίς ανθρώπινη επέμβαση. 3. Προλαμβάνει προβλήματα ποιότητας που προκαλούνται από μολυσματικά κατά τη συγχώνευση. 4. Εξοπλισμένο με καλιβροποιητικό ακρονύκιο TCP για ρομπότ.
Λογισμικό συγχώνευσης ρομπότ
Το λογισμικό μπορεί να εξάγει αυτόματα συνδέσεις κολλήσεως από σχέδια χωρίς σημειώσεις κολλήσεως, μειώνοντας την εργασία της χειροκίνητης συμμετοχής. Με το υψηλής απόδοσης 3D μηχανισμό και τον ελεγκτή ρομπότ, οι αυτόματα δημιουργούμενες σημείες μιμούνται και επαληθεύονται για να εvitae βαρύτητες συγκρούσεων κατά την πραγματική εργασία.
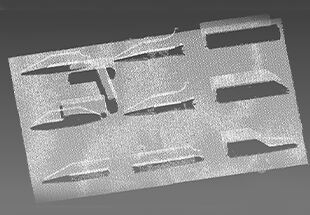
Και χωρίς τύπο σχεδίου, αντιστροφή μοντελοποίησης με 3D σάρωση, γρήγορη δημιουργία 3D σχεδίων, αυτόματη δημιουργία τροχιάς κολλήσεως ρομπότ, βελτιστοποίηση τροχιάς κολλήσεως, οπτικοποίηση κατάστασης, αυτόματη ανίχνευση σύγκρουσης κολλητικού στομιού.
LDWP-305 laser tracker
Το LDWP-305 είναι ένας νευρικός αισθητήρας γραμμικής σάρωσης συνδέσεων καύσης. Αποκτά τις πληροφορίες μορφοποίησης του τμήματος της σύνδεσης καύσης μέσω γραμμικής λειτουργίας λέιζερ, και καθοδηγεί τον ρομπότ ή την μηχανή καύσης να ολοκληρώσει αυτόματα την καύση. Οι λειτουργίες απόκτησης εικόνας, επεξεργασίας και αναγνώρισης της σύνδεσης καύσης εκτελούνται μέσα στον αισθητήρα χωρίς την ανάγκη για εξωτερικό υπολογιστή. Διαθέτει υψηλό βαθμό ολοκλήρωσης και μειώνει το συνολικό κόστος των συσκευασιών του συστήματος. Αντοχή στο φως της αρκτού και την απορρίψει, νευρική αναγνώριση συνδέσεων καύσης και εύκολη χρήση. Έχει λεπτομερή δομή, συμπαγές μέγεθος, υψηλή προσβασιμότητα και πλούσιες κατηγορίες. Μπορεί να επιλεγεί και να χρησιμοποιείται βάσει της εφαρμογής, και να παραγγελθούν οι πιο κατάλληλες παραμέτρους.

Προβάλλοντας Πλεονέκτημα
1.Υποστηρίζει μη διδακτική για διάφορα προϊόντα όπως διπλά πλάκα, τραπεζοειδής δόμης, κράτη, μεταξύ μοντέλων και πλατωνικών στηλών;
2. Δεν υπάρχει ανάγκη να σημειώνονται οι συρραφτικές ενώσεις κατά τη φάση σχεδιασμού, και η στόχος θέση της συρραφτικής ενόσεως μπορεί να εξαγάγεται αυτόματα με την εισαγωγή 3D σχεδίων;
3. Δεν απαιτείται ανθρώπινη παρέμβαση, ο ρομπότ αυτόματα εκτελεί ενέργειες όπως επιστροφή στο null, μετάβαση, εύρεση θέσης, συρραφιά, μέτρηση και καθαρισμό του στόμιου;
4. Δεν απαιτείται παρουσία στην τοποθεσία, το πρόγραμμα μπορεί να δημιουργηθεί παντού και να σταλεί απομακρυσμένα στον ρομπότ για παραγωγή σύμφωνα με την καθορισμένη ώρα;
5. Απόπειρα εξωτερικής προγραμματισμού, 1:1 προσομοίωση των κινήσεων του ρομπότ, εντοπίζει προημερείας τις διαταραχές του ρομπότ και αποφεύγει σύγκρουση;
6. Η τεχνολογία ψηφιακού δίδυμου μπορεί να εμφανίζει σε πραγματικό χρόνο την τροχιά του ρομπότ στην εγκατάσταση, την συρραφτική ένταση, την τρέχουσα, την ταχύτητα και άλλες πληροφορίες παραγωγής.
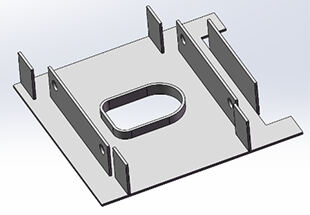
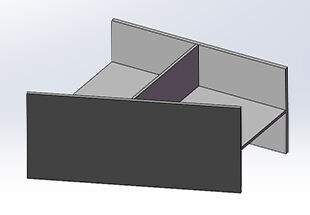
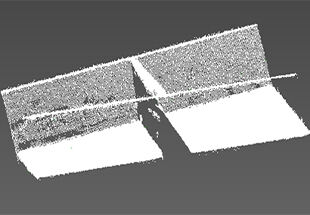
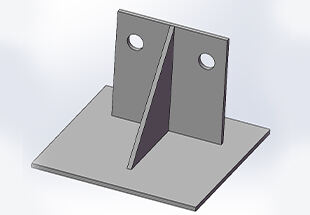
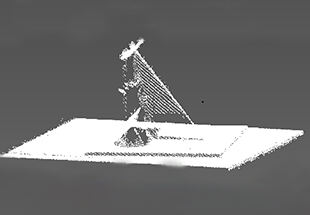
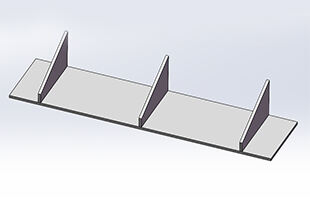
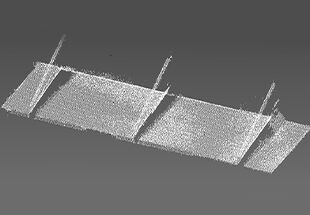
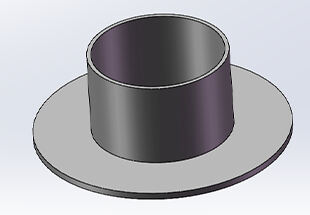
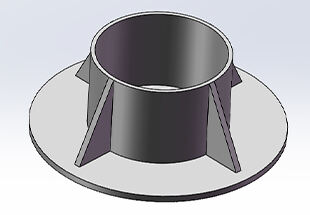
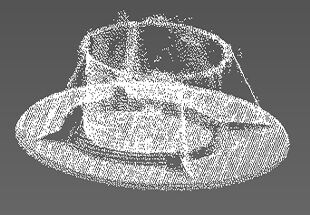
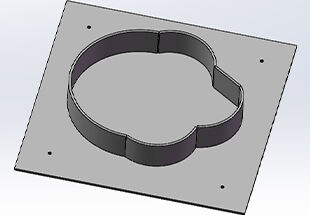
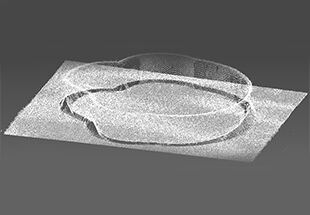
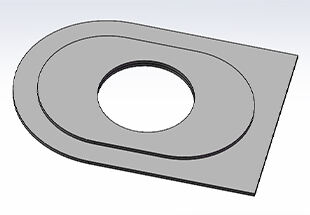
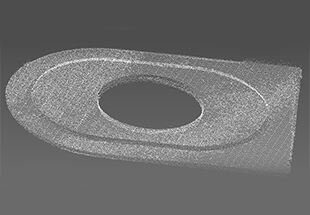
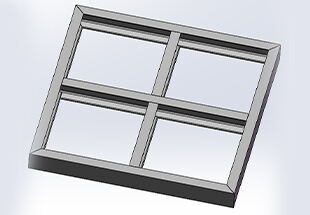
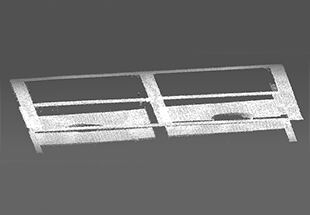
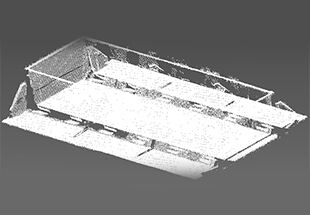
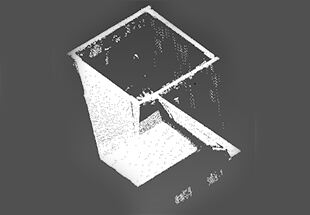
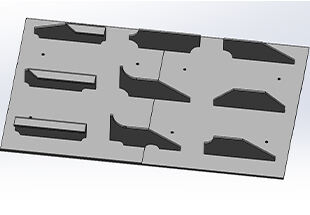
| Όχι | Είδος των κομματιών | Εικόνα του μοντέλου κομματιού | Εικόνα αναπαράστασης των σημείων του κομματιού |
| 1 | Η Beam (Συμπεριλαμβανομένων των συρραφτικών ενώσεων) | 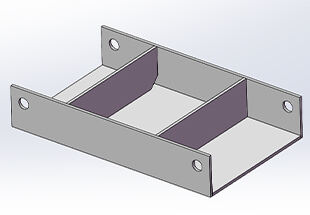 |
 |
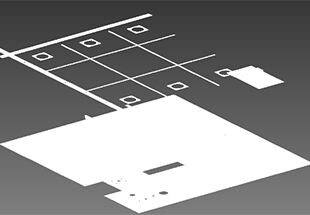
| 2 | Πλακωτό μονάδα |
 |
 |
| 3 | Χάλκινο κορβέλ |
 |
 |
| 4 | Με τύρετα |
 |
 |
| 5 | Πλάκα υποστήριξης πούρλιν |
 |
 |
| 6 | Βάση γιοφυρού οχτώ |
 |
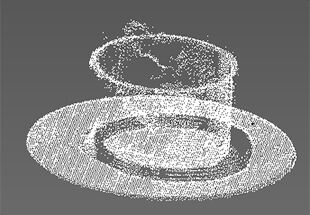 |
| 7 | Βάση κυκλικού οχτώ στα διαμετρικά |
 |
 |
| 8 | Ξένη επιφάνεια |
 |
 |
| 9 | Διπλό επίπεδο πλάκα |
 |
 |
| 10 | Συνέλιξη καναλιού μπαμ |
 |
 |
| 11 | Διπλή συνδεσιμότητα κόλλας | 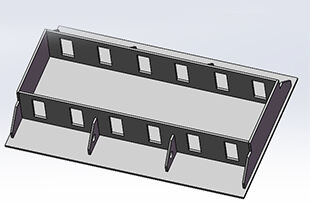 |
 |
| 12 | Κουτιοειδής καμπύλη |
 |
 |
| 13 | Ασυμμετρική καμπύλη συνδεσμού |
 |
 |
| 14 | Θάλαμος μετατροπείου |
 |
 |





