EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


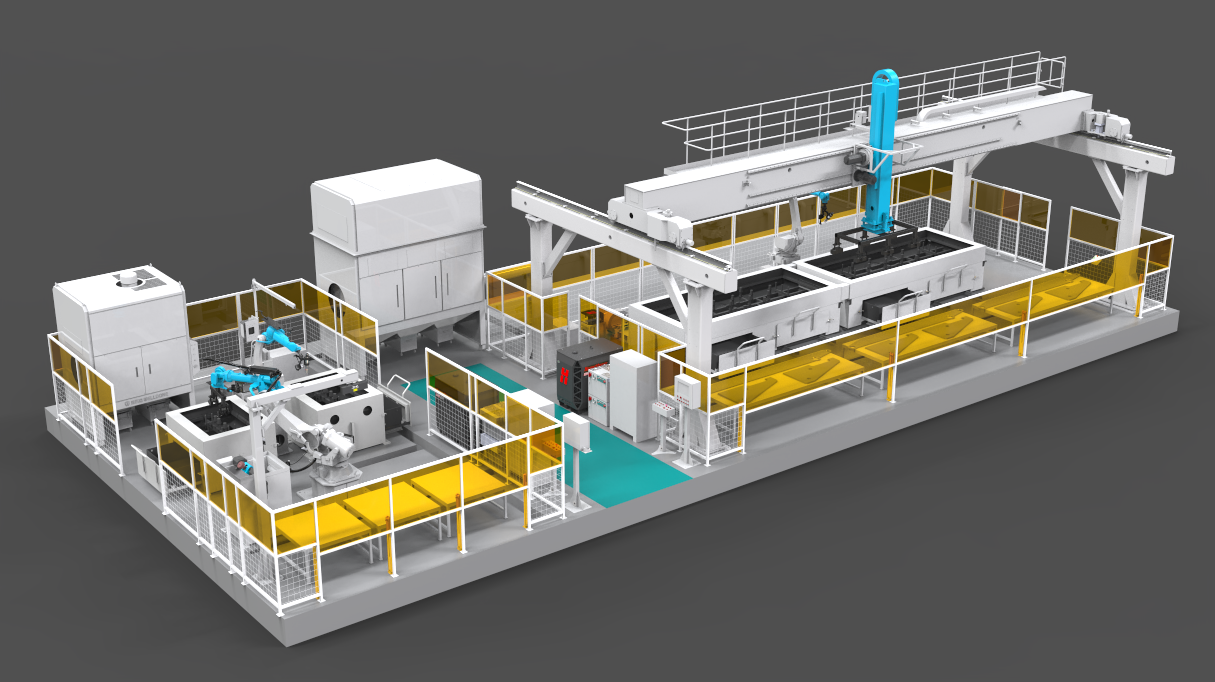
ইন্টেলিজেন্ট রোবটিক প্লাজমা কাটিং ফ্লেক্সিবল রোবট স্টেশন
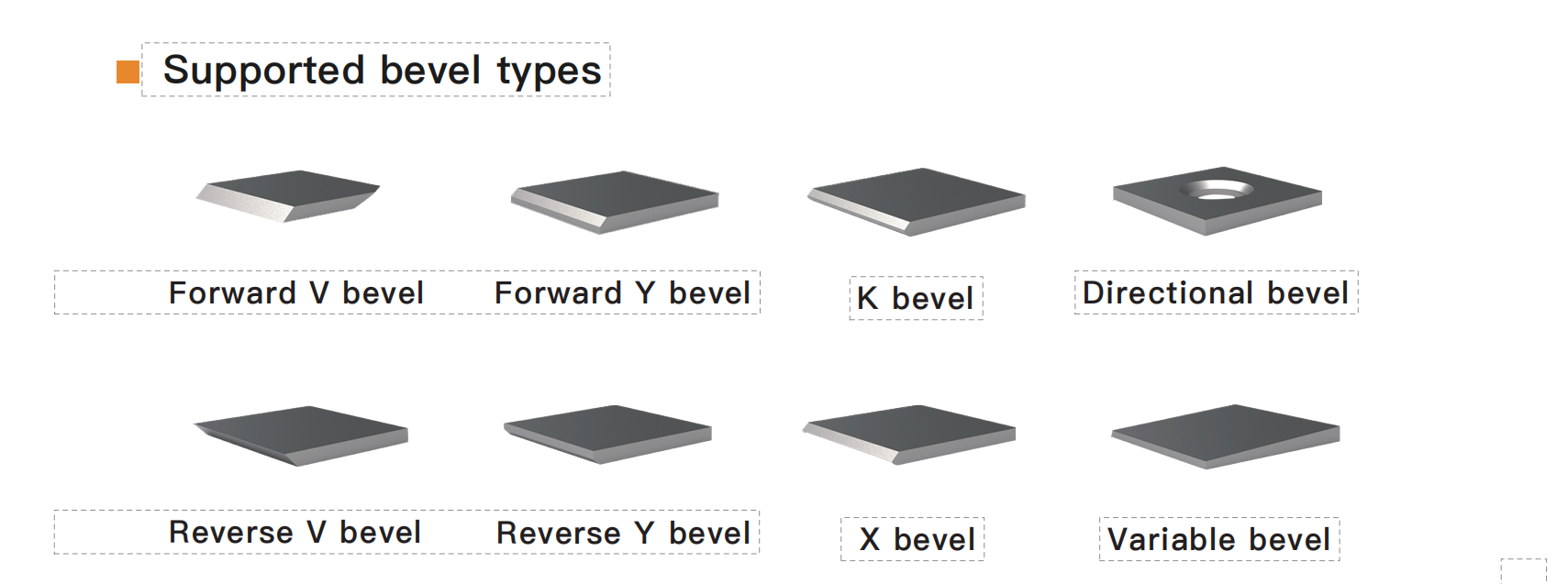
ধনাত্মক বেভেল: 100x100-2500x1000mm@20-45°
বিপরীত বেভেল: 100x100-2300x800mm@40-60°
NON-TEACHING INTELLIGENT Bevel Cutting
আগের প্রক্রিয়ার বেভেল কাটিং এবং ওয়েল্ডিং, গুণমান এবং দক্ষতা সমস্যা সরাসরি উৎপাদনের বottleনেক তৈরি করতে পারে, এটি বিশেষ ভাবে ছোট অংশের বেভেলিং-এ সত্য। ছোট অংশের বেভেলিং এখনও সাধারণত ঐতিহ্যবাহী ফ্লেম কাটিং ব্যবহার করে, যা প্রক্রিয়াতে আগে চিহ্নিত করা, স্থাপন করা এবং ফ্লেম ট্রলিতে বেভেল করা লাগে, এবং ছোট কাজের জন্য স্থান প্রয়োজন হয়। এছাড়াও, প্রতি বার যখন কাজের টুকরা পরিবর্তন করা হয়, তখন তা পুনরায় ব্যক্তিগতভাবে পুনরায় গরম করতে হয়। সুতরাং, ঐতিহ্যবাহী ফ্লেম কাটিং প্রক্রিয়ায় বেভেলের সামঞ্জস্য, গুণমান, দক্ষতা, শ্রম ব্যবহার এবং প্রয়োগের পরিসরে অসঙ্গতি এবং অন্যান্য দোষ রয়েছে।
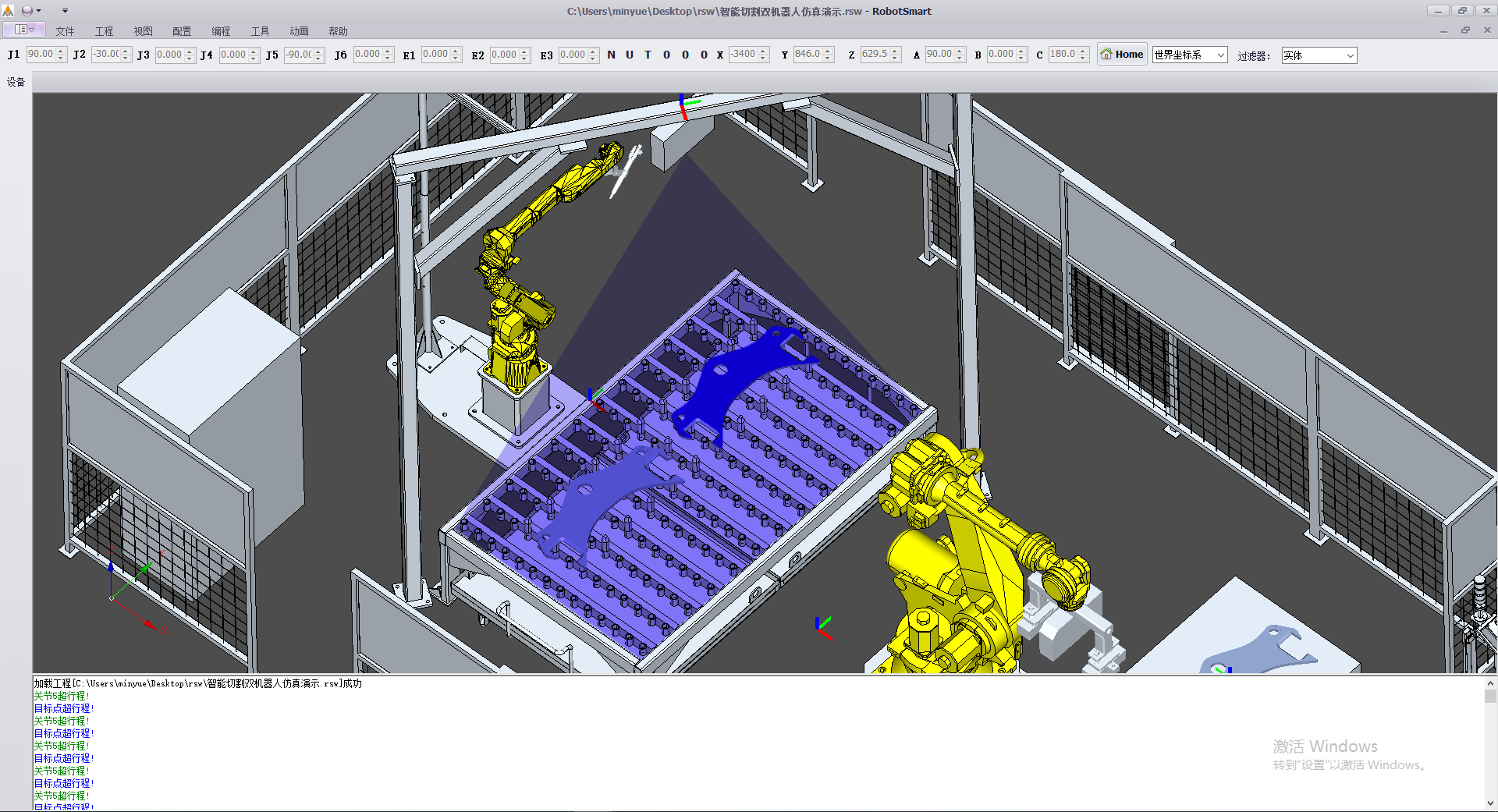
MINYUE TECHNOLOGY শিক্ষারহিত চালাক বেভেল কাটা রোবটস্মার্ট চালাক সিদ্ধান্ত গ্রহণ পদ্ধতি, SmartVisions 3D ভিজন সিস্টেম এবং SmartEye লেজার ট্র্যাকিং সিস্টেম ব্যবহার করে 'শিক্ষারহিত + ভিজন' চালাক বেভেল কাটা সম্পন্ন করে। এটি কঠিন প্রোগ্রামিং এবং চালাকির কম মাত্রার উৎপাদনের সমস্যা সমাধান করে এবং একই সাথে বিভিন্ন ধরনের ছোট ব্যাচের কাটা প্রয়োজন মেটায়, প্রক্রিয়া কার্যকারিতা এবং উৎপাদনের হার বাড়িয়ে তোলে।

আরও জটিল এবং বৈচিত্র্যময় কাজের মুখোমুখি হলেও, শুধুমাত্র তিনটি ধাপ আছে।
1. CAD DXF ফাইল ইম포র্ট করুন; 2. দ্রুত ট্র্যাজেক্টরি পরিকল্পনা; 3. কাটা প্রোগ্রাম স্বয়ংক্রিয়ভাবে তৈরি হয়, তারপর কাটা কাজটি দ্রুত সম্পন্ন হয়।
অটোমেটিক কাটিং পথ অপটিমাইজেশন, বেভেল পথের চালাক পরিকল্পনা, উপরের এবং নিচের বেভেলের বিপরীত কাটা নেই।
ডোয়েল ক্যামেরা চিত্র তুলে কাজের পাশের অবস্থান চিহ্নিত করতে এবং কাটা টেবিলে ধরতে এবং স্থানান্তর করতে। কাটা শেষ হলে CNC কাটা টেবিলে কাজ করতে যায়। একই সময়ে একাধিক কাজের পাশ এটেনশন করা হয়, এবং কাটা ট্রজেক্টরি স্বয়ংক্রিয়ভাবে পরিকল্পিত হয়, কাটা রেঞ্জ ০.৫ থেকে ৪ মিটার। এটি কাজের দক্ষতা এবং নিরাপত্তা গুরুত্বপূর্ণভাবে বাড়িয়ে দেয়। ফ্লেম কাটিং প্রক্রিয়া এবং প্লাজমা কাটিং প্রক্রিয়া সমর্থন করে।
বিভিন্ন লোডিং এবং আনলোডিং মোড সমর্থন করে, হাতে লোডিং এবং আনলোডিং, ক্যান্টিলিভার ক্রেন লোডিং এবং আনলোডিং, ট্র্যাভেলিং ক্রেন লোডিং এবং আনলোডিং, ডবল রোবট সহযোগী লোডিং এবং আনলোডিং, CNC লোডিং এবং আনলোডিং।
উৎপাদন প্রক্রিয়া
● হাতে কাটা টেবিলে কাজের পাশের সক্ষেত্রে মৌখিকভাবে অবস্থান নির্ধারণ (কাজের অবস্থানের পুনরাবৃত্তি ±৫মিমি মধ্যে)।
● সফটওয়্যার মাধ্যমে প্রথম উৎপাদন, কাটা অবস্থান স্বয়ংক্রিয়ভাবে নির্বাচন করা হয় এবং কাটা গেজ ট্র্যাজেক্টরি এবং প্রক্রিয়া পরামিতি তৈরি হয়, তৈরি করা প্রোগ্রাম নিয়ন্ত্রণ সিস্টেমে সংরক্ষণ করা যেতে পারে, পরবর্তী উৎপাদনে সরাসরি কল করা যাবে। (RobotSmart ইন্টেলিজেন্ট ডিসিশন প্ল্যাটফর্ম সিস্টেম মাধ্যমে 15-20 মিনিটে ডেপ্লয় করা যেতে পারে।)
● কাটা রোবট লেজার ভিশন সেন্সর ব্যবহার করে কাজের বস্তুকে ঠিকভাবে অবস্থান করায়। (অগ্রতর বৈশিষ্ট্য: টাচ এজ ফাইন্ডার থেকে বেশি কার্যকারিতা এবং সঠিকতা।)
● Ground Rail Gantry Cantilever Robot Workstations সমর্থন করে।
● সেগমেন্টড অ্যাপ্লিকেশন সিনারিওর জন্য 12টি সমাধান চালু করা হয়েছে।
সমর্থিত বেভেল টাইপস